

1. 서 론
2. 연구 방법
2.1 기존의 표면영상유속계측법
2.2 좌표 변환법
2.3 측정횡단면에 수직방향의 시공간영상 작성
2.4 시공간영상 분석법
3. 현장 적용과 평가
3.1 제작된 표면영상유속계
3.2 실제 홍수사상 분석
4. 결 론
1. 서 론
정확하고 풍부한 하천의 유량 자료는 하천관리와 수자원관리에서 핵심적인 중요한 자료이다. 그런데 하천의 유량을 한꺼번에 직접 측정하기는 매우 어려우므로, 일반적으로 하천 횡단면을 몇 개의 소단면으로 구분하고 측정점을 구성한 뒤 이 측정점에서 유속을 측정하고 소단면의 면적을 곱해서 유량으로 환산하는 유속면적법 (velocity-area method)이 널리 이용되고 있다. 유속면적법을 적용하는 경우 유속을 어떻게 측정할 것인가가 핵심적인 문제가 된다.
특히 우리나라 하천들과 같이 갈수기, 평수기와 홍수기의 하천의 상황 (수위, 유속, 유량, 횡단면적 등)이 크게 차이가 나는 경우 이런 상황에 모두 맞게 유량을 측정하는 것은 매우 어려운 일이다. 우리나라에서는 유속을 측정하는 상황을 저수시, 평수시, 홍수시의 세 가지로 나누어 생각할 수 있다. 이를 유속으로 생각하면 저수시나 갈수시는 0.5 m/s 이하, 평수시는 0.5 - 1.0 m/s 정도, 홍수시는 1.0 m/s 이상으로 생각해도 무방할 것 같다. 저수시에는 프로펠러유속계나 자기유속계 (magnetic current-meter), 초음파유속계 등 전통적인 유속계를 이용한 도섭법이 거의 유일하고 적절한 대안이다. 평수시의 유속측정은 가장 다양한 선택지가 있으며, 교량 위나 보트 위에서 ADCP를 이용하는 것이 가장 효율적이고 정확하다고 생각한다. 반면, 홍수시는 전통적으로 부자법이 널리 이용되고 있다 (KIHS 2018). 그러나 홍수시는 어떤 장비든 운용이 어려우며 측정작업에 시간과 비용, 경비가 많이 소요되므로, 최근에는 보다 편리하게 비접촉으로 측정하려는 시도가 다양하게 이루어지고 있다. 예를 들어, 전자파표면유속계 (Miyaura et al. 2012, Kim et al. 2015)와 표면영상유속계 (Aya et al. 1995, Fujital et al. 1998, Fujita et al. 2002, Fujita and Tsubaki 2003, Fujita et al. 2005, Kim et al. 2011, Yu et al. 2014, Yu et al. 2015, Yu and Whang 2016, Fujita. 2017, Bae et al. 2017, Yu and Liu, 2021, Lee 2023)의 개발과 적용이 바로 이런 노력의 대표적인 예이다.
본 연구에서는 이런 하천 유속 측정에 ‘실용적’으로 대처할 수 있는 표면영상유속계를 개발하기로 하였다. 여기서 말하는 ‘실용적’이라는 용어의 의미는 ① 연속 측정, ② 모든 상황, ③ 빠른 분석의 이 세 가지에 중점을 두고자 한다. 이런 목표를 달성하기 위해서는 표면영상유속계를 하드웨어적인 면과 소프트웨어적인 면에서 모두 개선을 해야 한다.
먼저 ①의 ‘연속 측정’을 위해서는 반드시 CCTV와 같이 고정설치형 카메라를 이용해야 하며 때로는 일반 카메라가 아닌 열영상 카메라를 이용해야 할 경우도 있다. CCTV를 이용한 유량측정에 대해서는 Cheong et al. (2018)에서 이미 자세히 다룬 바 있다. 다만, Cheong et al. (2018)에서는 8-변수 죄표변환을 이용하므로, 급격한 수위변화에 대응하기 힘들며, 상호상관법으로 유속분석을 하므로 신속한 유속 분석이 어렵다는 문제가 있었다. 즉, 기존의 방법으로는 ②의 모든 상황과 ③의 빠른 분석에 대응할 수 없다. 그래서 이러한 문제를 해결하기 위해 11-변수 투영법을 이용하여 수위변화에 대처할 수 있도록 하고, 영상분석에는 시공간영상분석법을 도입하여 신속하고 정확한 유속분석이 가능하도록 하고자 한다.
2. 연구 방법
2.1 기존의 표면영상유속계측법
표면영상유속계측법은 입자영상유속계측법 (PIV, particle image velocimetry)의 유속 산정 원리를 기초로, 한 쌍의 영상을 이용하여 하천 표면의 2차원 유속 분포를 계측하는 방법이다.
표면영상을 이용한 유속측정을 처음으로 하천에 도입한 연구는 Aya et al. (1995)의 연구라 볼 수 있다. 이들은 캠코더로 하천의 표면영상을 촬영한 동영상을 PC로 분석하여 유속장을 산정하였다. 이 때 사용한 영상분석 방법은 가장 단순한 상호상관법이다 (Yu and Park, 2016, Raffel et al. 2018). 이 방법은 실험실에서 주로 사용하던 PIV 기법을 하천 표면이라는 큰 규모에 적용했다는 의미에서 Ettema et al. (1997)이 LSPIV (large scale particle image velocimetry)라고 이름을 붙였다. 국내에서는 장치의 특성인 표면 영상을 이용하여 유속을 측정한다는 의미에 보다 충실하기 위해 표면영상유속계측법 (surface image velocimetry)이라 하고, 이 기법으로 유속을 측정하는 장비는 표면영상유속계 (SIV, surface image velocimeter)로 부르고 있다(Kim et al. 2011).
표면영상유속계를 실시간으로 적용하기 위해서는 CCTV와 같은 고정식 카메라의 활용이 거의 필수적이다. 일본에서는 Fujita et al. (2002)이 하천관리용 CCTV인 ITV시설을 이용하여 실시간으로 하천의 표면유속을 측정하려 시도한 바 있다. 이 과정에서 발생하는 영상 전송의 문제, 동영상 저장장치의 문제, ITV의 부적절한 설치지점 등을 지적하기도 하였다. 이런 노력은 나중에 일본 토목연구소 (PWRI 2016)에서 홍수유량관측을 위한 매뉴얼에 STIV와 Float-PTV로 반영되었다. 또한 Hauet et al. (2008)은 LSPIV 기법을 개량하여 실시간 유량산정이 가능한 실시간 표면영상유속계를 개발하고 이를 Iowa 강에 적용한 바 있다. 국내에서는 Kim et al. (2011)이 (CCTV가 아닌) 두 대의 카메라를 이용한 고정식 표면영상유속계를 개발하고 괴산댐 방류량과 실시간 유량계측결과를 비교하는 방법으로 정확도를 검증한 바 있다. 국내에서 CCTV 기반의 표면영상유속계를 개발하려는 본격적인 시도는 Cheong et al. (2018)로 볼 수 있다. 이들은 행정안전부에서 관리하는 소하천에 설치되는 하천관리용 CCTV를 적극 활용하여 실시간 유량관측이 가능하도록 개발한 바 있다. 다만, 이 때 사용하는 하드웨어와 소프트웨어 모두 기존의 방식을 그대로 따랐기 때문에, 소하천이라는 하천의 특성이나 유속산정이 아닌 유량산정이라는 최종목표에 특화된 것이라 보기는 어렵다. 본 연구에서 추구하는 목표는 바로 이러한 기존 연구의 한계를 극복하고, 앞서 본 연구의 최종목표인 ‘실용적’인 표면영상유속계를 구축하고자 하는 것이다.
2.2 좌표 변환법
표면영상유속계에서는 영상이 기울여져 촬영되는 경우가 많기 때문에 좌표변환을 통해 이를 적절히 정사영으로 변환해 주어야 한다. 기존의 방법에서는 Fujita and Komura (1994)가 제안한 8변수 투영법을 많이 이용하였다 (예를 들어, Yu et al. 2014).
그런데 앞서 실용적인 표면영상유속계의 목표 중 두 번째가 바로 급변하는 수위상황에도 적절히 대처할 수 있어야 한다는 것이다. 이를 위해서는 8변수 투영법이 아닌 11변수 투영법을 이용해야 한다. 11변수 투영법은 3차원 공간을 2차원 평면으로 변환하는 투영법이며, 다음에 보인 Eq. 1에 보인 것처럼 결정해야 할 계수가 11개 이기 때문에 이런 이름으로 부른다. 11변수 투영법은 사진측량분야에서는 이미 오래전에 개발 (Fujita et al. 1998)된 것이며, 본 연구에서는 이를 동영상 분석에 적용하기 위해 약간의 변형을 가하였다. 따라서 이에 대해 간략히 살펴보기로 한다.
하천 수표면과 카메라 영상사이의 관계는 다음 (Fig. 1 참조)과 같이 쓸 수 있다.

Fig. 1
Coordinates transform between physical coordinates and image coordinates (Fujita et al. 1998).
여기서 (C, R)은 영상좌표 (열,행)이고, (X, Y, Z)는 물리좌표, a0 - a10은 변환계수이다.
이 Eq. 1은 3차원 공간을 2차원 평면에 투영시키는 투영변환이다. 따라서, 그 역변환 즉, 영상 좌표 (C, R)을 물리좌표, (X, Y, Z)로 투영하려면, 물리좌표의 세 값 중 하나를 반드시 알아야 한다. 따라서, 만일 수위 (수면의 표고) ZW를 기지값이라 하면, 이 역변환은 다음과 같다.
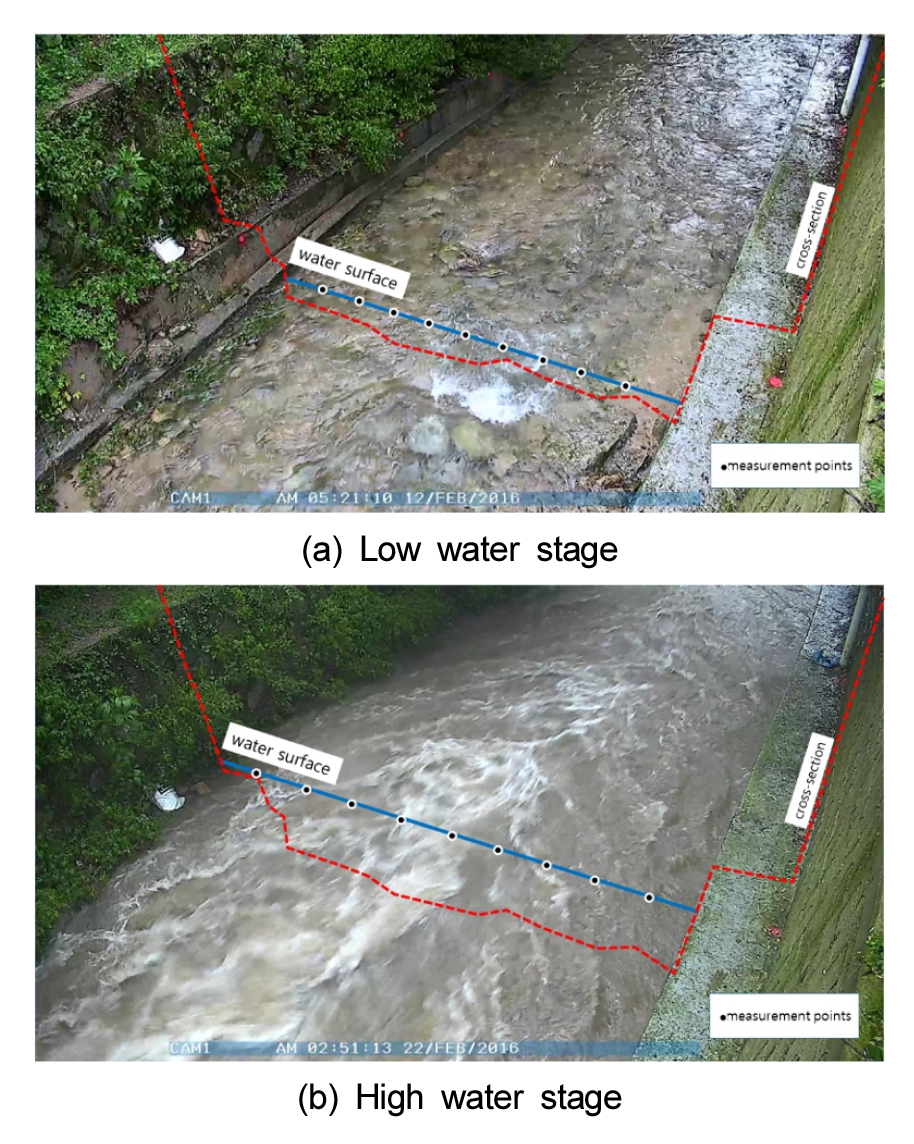
이 11변수 투영법을 실제 현장에 적용하여, 수위 변동에 따라 측정점이 적절히 수정되는 예를 인수천에 설치된 시스템을 예로 들어 Fig. 2에 보인다. Fig. 2에서는 저수위일 때와 고수위일 때 측정점이 수면고에 맞추어 위아래로 이동하는 모습을 보여준다.
2.3 측정횡단면에 수직방향의 시공간영상 작성
기존의 많은 표면영상유속계 (Fujita et al. 2013, Yu et al. 2014)에서는 측정횡단면의 각 측정점에서 시공간영상을 구성한 뒤 이 시공간영상을 분석하여 각 측정점의 유속을 구하고 이 유속에 측정소단면의 면적을 곱하여 유량을 산정하였다. 이 때 Fujita et al. (2013)의 방법에서는 2차원 유속성분을 구할 수 없으므로, 영상의 주흐름방향과 촬영방향을 적절히 조절해야만 하는 문제가 있었다. 한편, Yu et al. (2014)에서는 영상의 가로방향과 세로방향 각각으로 시공간영상을 구성하고 2차원 유속성분을 구하고자 하였다. 반면에, 일본의 Notoya et al. (2017)은 시공간체적을 구성한 뒤, 이 시공간체적을 직접 분석하여 2차원 유속성분을 산정한 후 여기서 유량을 산정하고자 시고도하였다. 이 경우 문제는 영상분석에 걸리는 계산부하가 크다는 점이다.
본 연구에서는 이를 해결하고자. 각 측정점에서 시공간체적을 구성한 뒤, 이 시공간체적에서 측정횡단면에 수직방향 (이를 ‘주흐름방향’이라 하자)의 시공간영상을 하나 추출하고, 이 시공간영상을 분석하여, 주흐름방향의 유속성분만을 구한다. 이 경우, 대부분의 하천에서는 유량을 계산할 때는 주흐름방향만 필요하며, 2차류나 횡단방향의 유속성분은 관심의 대상이 아니기 때문에 주흐름방향의 유속성분만으로 충분하다고 생각한다.
먼저 영상 내에서 주흐름방향을 지정해야 한다. Fig. 3에 보인 것처럼 물리공간의 측정횡단면의 좌안 끝점의 물리좌표를 (x0, y0), 우안 끝점의 물리좌표를 (xn, yn), 그리고 첫번째 측정점을 (x1, y1), m번째 측정점의 좌표를 (xm, ym)이라 하면, m번째 측정점에서 측정횡단면에 수직방향으로 1 m 떨어진 점의 물리좌표는 (x'm, y'm)로 나타낼 수 있다.
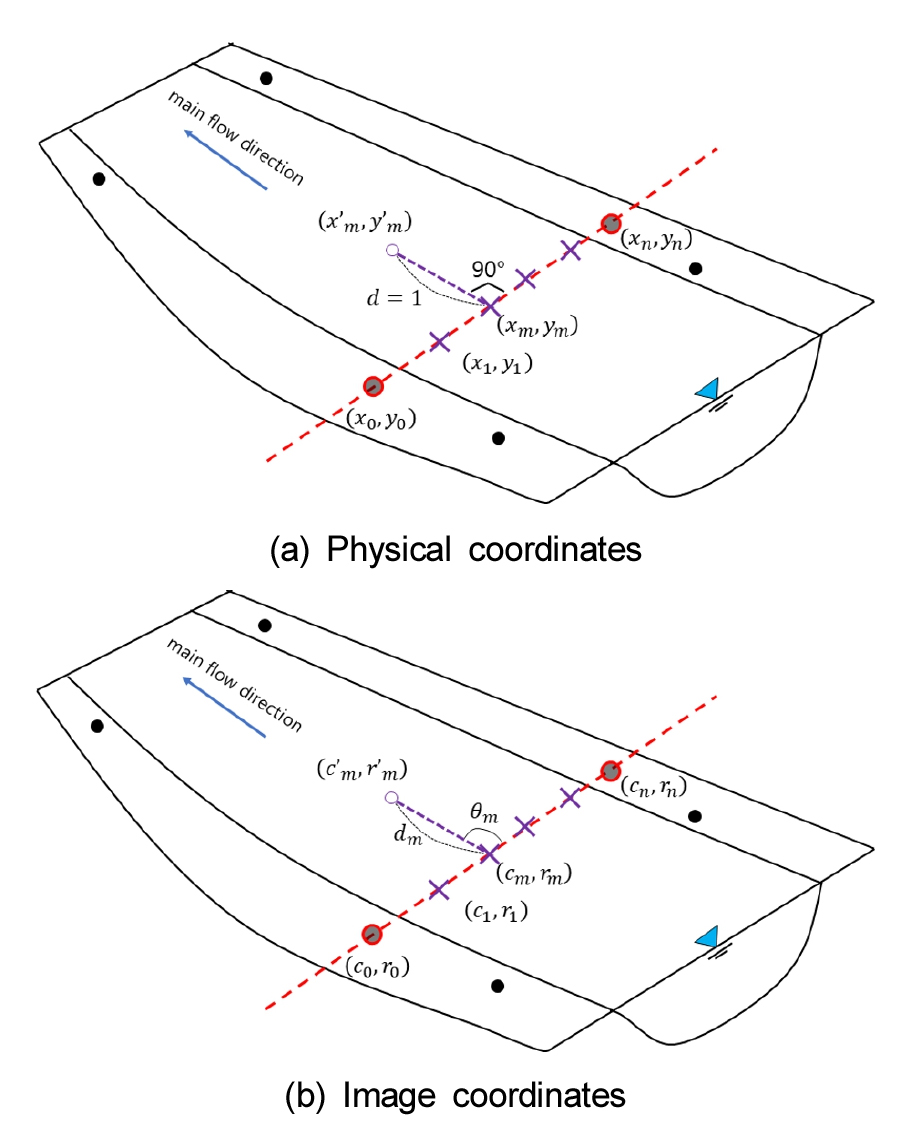
여기서 이다.
각 측정소단면에서 두 개의 물리좌표 (xm, ym)과 (x'm, y'm)을 구하고, Fig. 3에 보인 것처럼 수위가 Zw일 때의 영상좌표로 변환한 것을 각각 (cm, rm)과 (c'm, r'm)이라 하면 영상내에서 측정횡단면에 수직인 방향 (이것을 ‘영상방향’이라 하자) θm은 다음과 같이 주어진다.
Fig. 4는 Eq. 2로 계산된 영상방향을 이용하여, 각 측정점 위치에서 만들어진 시공간체적에서 시공간영상을 추출하는 과정을 개념적으로 보인 것이다. 먼저 각 측정점 위치에서 잘라낸 영상조각을 영상중앙을 회전중심으로 하여 영상방향과 반대방향만큼 회전하면 우리가 원하는 영상방향이 가로로 놓이게 된다. 여기서 중앙의 한 줄을 잘라내고, 이 과정을 원하는 시간동안 반복하면서 잘라낸 한 줄영상을 계속 쌓아 시공간영상을 만들면, 이것이 정확한 영상방향의 시공간영상이 된다.

2.4 시공간영상 분석법
표면영상계측법에서 영상분석을 위한 가장 기본적인 방법은 입자영상유속계측법 (PIV, particle image velocimetry)에서 이용하던 상호상관법 (cross-correlation method)이다 (Yu and Park 2016, Raffel et al. 2018). 그런데, 상호상관법은 한 쌍의 영상에서 순간유속을 분석해 내는 것이므로, 본 연구에서와 같이 유량산정을 위한 시간평균유속을 산정하는 데는 적합하지 않을 수 있다. 즉, 이 방법은 PIV와 같이 짧은 시간간격 사이의 유속 측정에는 유리하나, SIV에서처럼 영상 내 추적자로 사용할 만한 변화가 부족하거나 영상에 잡음이 존재할 경우 유속을 제대로 측정하기 어려운 한계를 갖는다. 또한 야간이나 강우시, 안개 등 악조건에서 촬영된 영상을 분석할 때 상호상관법이 영상을 적절히 분석할 수 없다는 것은 많은 연구자들이 지적한 바 있다 (Fujita and Hino 2003, Fujita et al. 2009, Kim 2013, Bae et al. 2017). 요약하자면, 상호상관법의 약점은 ① 잡음, ② 낮은 영상대조, ③ 악조건 영상에 대한 적용이 어렵다는 점이다.
Fujita and Tsubaki (2003)의 시공간영상을 이용한 휘도경사텐서법은 기존 상호상관법과 비교하여 계산시간이 빠른 장점이 있다. 이는 상호상관법이 측정시간 동안의 영상 프레임을 모두 분석하여 산정되는 순간유속들을 평균하여 평균유속을 산정하는데 비해, 시공간 영상을 이용한 휘도경사텐서법은 측정시간 동안의 영상 프레임 전체를 한 장의 시공간 영상으로 만들고 이를 분석함으로써 평균유속을 산정해내기 때문이다. 즉, 연산량이 약 (여기서 n은 분석에 사용하는 영상의 수)로 줄어든다. 또한 상호상관법은 유속이 느릴 경우 프레임 사이 영상 명암값 변화가 매우 적어 유속을 산정하는데, 추적자의 상관계수가 매우 낮아지거나 추적자가 한 화소 이하로 이동하면서 유속 산정에 어려움이 생긴다. 그러나 휘도경사텐서법은 연속되는 시계열 영상을 전부 이용하기 때문에 주어진 정보가 적더라도 충분히 분석에 활용할 수 있다. 따라서, 상호상관법 대신에 시공간영상분석법을 채택하는 것은 실용적인 표면영상유속계 개발에 필수적이라 볼 수 있다.
그래서 Yu and Liu (2021)은 고속푸리에변환 (FFT, Fast Fourier Transform)을 이용한 시공간영상분석법을 제안하였다 (Fig. 5 참조). 이 방법은 시공간영상을 FFT 변환한 동력분광영상 (power spectrum image)에서 영상기울기 즉, 최대값을 찾아내기 위해 Zhang et al. (2017)의 방법과 유사하게 0.1° 단위로 최대값이 되는 기울기를 찾는 것이다. 다만, 탐색속도를 증가시키기 위해, 먼저 개략적으로 10° 단위로 최대값을 찾고, 그 다음에 그 10° 범위 안에서 1°씩 증가시켜가며 최대값을 찾고, 다음에 그 1° 범위 안에서 0.1°씩 증가시켜가며 최대값을 찾는 방법을 이용하였다. 이 경우 Zhang et al. (2017)의 방법으로 0° - 179.9° 범위의 탐색에는 총 1,800번의 계산이 필요한 반면, 본 연구의 방법에서는 탐색의 최대 실행수가 33번이 된다.

3. 현장 적용과 평가
3.1 제작된 표면영상유속계
이런 과정을 거쳐 제작된 표면영상유속계 시스템을 서울시 도봉구 인수천의 지성교 하류에 설치하였다 (Fig. 6 참조). 계측장치는 인수천의 지성교 (37˚ 40' 1.72'' N, 127˚ 0' 35.23'' E)에 설치되었다. 인수천의 본류인 우이천은 중랑천 유역의 중․하류부에 위치하며 하상경사는 하구 (No.0)에서 대동천 합류점 (No.134)까지는 1/501 - 1/218로 비교적 완만하며, 대동천 합류점 (No.134)이후 상류는 1/68로 급경사를 이루고 있다. 또한 유역면적은 27.29 ㎢, 유로(Yu and Liu 2021)연장은 12.35 km이다. 설치된 시스템의 하드웨어 구성은 Fig. 6 (b)와 같다. 측정횡단면 Fig. 6 (c)와 같은 다양한 참조점을 이용하여 구성하였으며, 좌안에서부터 1 m 간격으로 7개의 소단면으로 구성하였다.

3.2 실제 홍수사상 분석
서울시 일원에는 2022년 8월 8일 - 9일에 큰 호우가 내렸다. 이 때 최대강우강도는 141.5 mm/hr에 이르렀다. 특히 한강 이남지역이 많은 피해를 입었으며, 인수천 현장에서도 이 기간 동안 큰 유출이 발생하였다. 표면영상유속계 시스템을 설치한 현장에서 15시부터 21시까지 사이에 5분 간격으로 1분씩 영상을 촬영하였다. Fig. 7은 오후 3시부터 오후 8시까지의 정시의 흐름 상황을 보여준다.

개발된 STIV를 이용하여 15시부터 21시까지의 총 90개 동영상을 분석하였다. 실제 현장에 설치된 컴퓨터의 STIV에서도 실시간으로 같은 분석이 이루어졌으나, 그 내용을 검토하기 위해 저장된 동영상을 PC로 옮겨서 같은 프로그램으로 재분석하였다. 90개의 동영상을 분석하는 데 소요된 시간은 1분 20초 정도로 1분 짜리 Full HD급 동영상 (1,920×1,080) 하나를 분석하는 데 소요되는 시간은 1초 미만이었다.
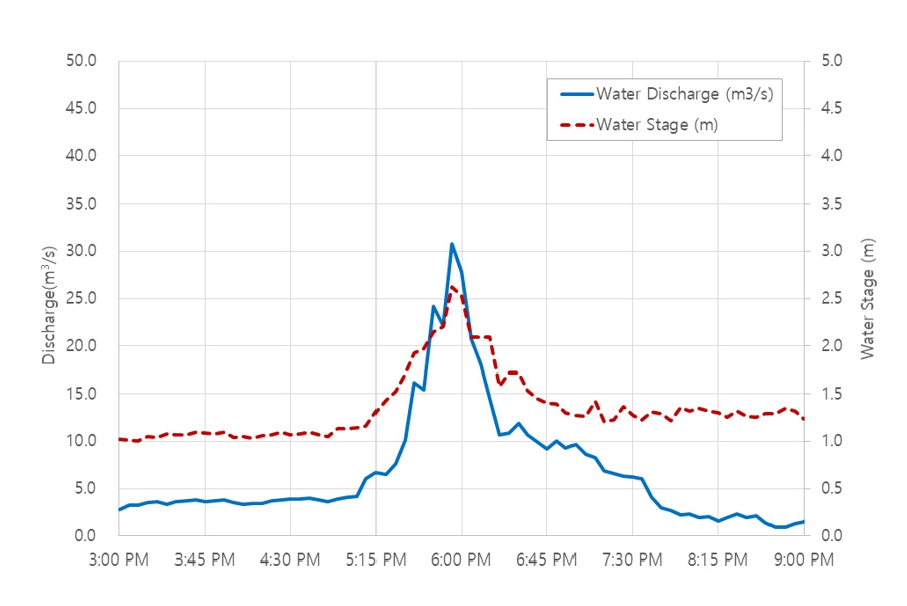
이 기간 동안 최대 수위는 17시 55분의 2.62 m이고, 최대유량은 이 때의 30.78 m3/s이었다. 또한 이 때의 소단면의 최대유속은 좌안의 1번 단면의 2.91 m/s이었다. 그리고 이 때 수문곡선은 Fig. 8과 같다.
Fig. 8의 결과를 보면, 본 연구에서 개발된 표면영상유속계는 실시간으로 유량을 적절히 산정하였음을 알 수 있다. 다만, 유량산정 결과를 검증할 수 있는 방법이 별로 없어 정확성에 대해서 단정하기는 힘들지만, Cheong et al. (2018)의 초음파유속계를 이용한 검증 결과에서도 알 수 있듯이 표면영상유속계는 유량을 적절히 잘 재현하였다고 판단할 수 있다. 다만, Fig. 7과 Fig. 8에서 보면, 수위 변동이 상당하며, 수위 측정에도 상당한 오차가 포함될 수 있다고 생각한다. 이러한 수위 측정 오차는 아울러 산정된 유량에도 상당한 오차를 일으킨다. 정온용 우물통을 설치할 수 없는 소하천의 유량측정지점에서 초음파수위계에 의한 수위측정자료를 어떻게 하면 적절히 처리하여 적절한 수위를 환산할 수 있을까 하는 점은 추후에 해결해야 할 과제이다.
4. 결 론
본 연구의 내용을 요약하면 다음과 같다.
(1) 실용적인 표면영상유속계를 구성하기 위해 CCTV로 2분 간격으로 30초간의 영상을 촬영하는 장비를 구성하였다.
(2) 촬영된 영상을 분석하는 소프트웨어에는 11변수 투영법을 적용하여 변화하는 수위에 따라 정확한 측정점을 재구성하도록 하였다.
(3) 각 측정점에서 주흐름방향으로 정확한 시공간영상을 작성할 수 있도록 시공간영상 작성법을 개발하였다.
(4) 개발된 방법으로 구성된 표면영상유속계를 제작하여 인수천에 시험적용하여 호우 사상에 대해 검토한 결과 정확하고 신속한 연속적인 유량측정이 가능하였다.
이상과 같이 본 연구에서는 인수천과 같은 소하천에 대한 CCTV 표면영상유속계의 적용이 성공적으로 이루어졌다. 본 연구에서는 다루지 않은 보다 넓은 중대규모 하천의 상황에서 매우 유속이 느린 경우에는 이 표면영상유속계의 적용하면 오차가 비교적 큰 문제가 있었다. 이를 개선하기 위한 방법에 대해서는 추후 연구에서 다루기로 한다.
