

1. 서 론
2. 연구 방법
2.1 3차원 포인트 클라우드 기반 기하학적 분석 방법
2.2 고해상도 포인트 클라우드 구축
2.3 포인트 클라우드의 후처리 과정
3. 3차원 포인트 클라우드 단일 식생의 기반 부피 산정 결과
3.1 식생 부피의 기준값(reference value) 측정
3.2 Alpha Shape을 활용한 부피 산정
3.3 Voxel을 활용한 부피 산정
4. 고 찰
1. 서 론
최근 기후변화의 영향으로 홍수와 갈수시기의 양극화 현상이 증가하고 있으며, 갈수 일수가 늘어날수록 하천 환경 내 식생의 활착이 증가하는 추세이다 (Jin et al. 2016, Lee 2019, Woo et al. 2019, 2016). 이러한 하천 식생의 증가는 홍수시 흐름을 방해하여 유속을 저하시키며 수위 상승에 영향을 미쳐 홍수 피해에 영향을 미칠 수도 있다. 따라서 급격히 증가하는 하천 식생의 규모와 분포를 정확히 파악하여 분석하는 것이 필요하다.
현재까지 하천에서 식생의 물리적 형상을 분석하는 것은 실제로 현장에 나가 매뉴얼 조사를 통해 일일이 그 수를 헤아리고 수치를 재거나 상공에서 측정된 영상 자료를 기반으로 규모와 분포를 추정하는 시도가 대부분이었다. 최근에는 고도화된 측정기술의 발달로 3차원 지상 라이다 스캔 혹은 무인 항공체인 드론을 활용한 대량의 이미지를 통해 좌표를 매핑하거나 수집된 포인트 클라우드를 기반으로 객체를 재구현 시키는 연구가 시도되고 있다. Jalonen et al. (2015)의 연구에서는 지상 레이저 스캐닝 (Terrestrial Laser Scanning, TLS)를 활용하여 홍수터 식생을 측정하여 Leaf Area Index (LAI), 식생의 면적, 부피, 흐름 차단 영역 등을 분석한 후 매뉴얼 조사와 비교하였다. 이와 더불어 Maas et al. (2008), Rutzinger et al. (2010), Dassot et al. (2012), Jalonen et al. (2014) 및 Li et al. (2014)의 연구 등에서도 TLS를 활용하여 식생을 측정한 후 매뉴얼 조사와 비교하여 정확도 및 관계를 분석하는 연구를 수행한바 있다. 이러한 연구를 통해 TLS 활용의 적용성을 검증하는 동시에 각각의 식생으로부터 추정된 물리적 지표를 활용하여 바이오매스를 추정하는 연구도 시도되고 있다(Kankare et al., 2013). Jang et al. (2020)의 연구에서는 식생의 물리적 구조를 3차원 포인트 클라우드로부터 잎-가지-줄기로 구분하여 각각의 정밀도를 분석하였으며, Ahn et al. (2020)의 연구에서는 포인트 클라우드를 기반으로 구축된 Voxel 정보를 통해 식생 구조를 재구현 하였다. 이러한 식생의 물리적 구조를 포인트 클라우드를 활용하여 기하학적으로 분석하는 연구에는 대표적으로 Bienert et al. (2010), Hosoi et al. (2013), Bienert et al. (2014) 및 Grau et al. (2017) 연구 등이 있다. 특히 Yan et al. (2019)의 연구에서는 식생의 부피 계산을 통해 Convex Hull과 Alpha Shape, Voxel 기법 등을 적용하여 각각의 방법을 비교하였다. 그러나 이러한 많은 연구자들의 시도에도 불구하고 수많은 식생의 종류 및 생장시기에 따른 영향이 큰 물리적 형상을 정확하게 구현해 내는 것은 쉽지 않은 일이다. 특히 대용량의 포인트 클라우드의 경우 필터링 과정에 따라 최적의 데이터가 다르게 평가될 수 있다. 또한 다수의 식생이 밀착되어 있거나 패치 형식으로 활착 된 식생은 레이저 스캔의 특성상 내부의 정보를 파악하기 어려운 경우가 많아 다양한 기하학적인 분석 방법을 통해 식생의 정보를 파악할 필요가 있다.
본 연구에서는 지상 레이저 스캐닝을 통해 정밀하고 대용량으로 수집되는 3차원 포인트 클라우드를 기반으로 필터링 과정을 통해 원시 자료로부터 최적의 데이터를 도출하고자 한다. 또한 최적화 된 포인트 클라우드를 활용한 객체 재구현을 통해 부피를 산정해보고 실제 측정된 부피와 비교하고자 한다.
2. 연구 방법
2.1 3차원 포인트 클라우드 기반 기하학적 분석 방법
스캐너 혹은 드론을 활용하여 수집된 3차원 포인트 클라우드는 모두 단일 포인트로 구성되어 있기 때문에 형태를 추정하거나 형상을 재구현하기 위해 별도의 재구성 방법이 요구된다. 이 중 대표적으로 Convex Hull, Alpha Shape, Voxel을 활용하는 방법 등이 있으나, Convex Hull 알고리즘의 경우 단순하게 가장자리를 연결하여 표면 처리를 하는 방법이기에 식생과 같이 불규칙 단면을 이루는 형상을 재구현하는데 한계가 있었다. 따라서 본 연구에서는 Alpha Shape와 Voxel을 활용하여 식생의 부피를 추정한 후 실제 부피와 비교하고자 한다.
2.1.1 Alpha Shape 기법
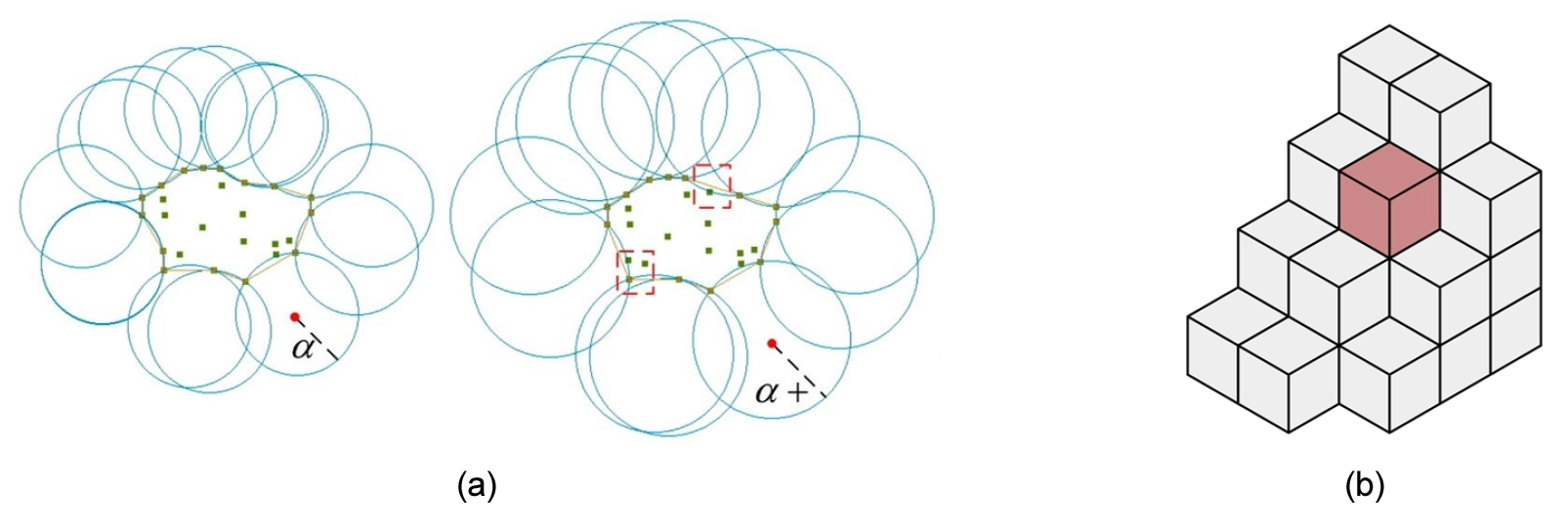
기하학적 계산 방법 중 하나인 Alpha Shape 접근은 이산 공간 포인트 세트에서 2차원 혹은 3차원으로 구성된 포인트를 재구성하는 기법이다. Alpha Shape는 Fig. 1 (a)와 같이 2차원 또는 3차원 점 집합을 둘러싸는 경계 영역이나 부피를 구성한다. 이를 위해 임의로 선택된 두 포인트의 윤곽을 연결하는 반지름 α인 원을 그려 수 개의 원으로 둘러 쌓인 2차원 혹은 3차원의 객체를 형성한다. 복잡한 객체에 대한 포인트 클라우드에서는 단순히 외곽의 점을 연결하는 Convex Hull 방법에 비해 정교한 형상을 구현해낼 수 있다.
2.1.2 Voxel 기법
Voxel이라는 용어는 부피 (volume)와 픽셀 (pixel)을 조합한 합성어이다 (Wikipedia 2006). Voxel은 기존의 2차원 공간에서 x-y 좌표를 3차원 공간으로 확장시킨 것으로 입체를 격자로 분해한 체적 요소를 의미한다 (Ahn et al. 2020). Voxel 기반 방법은 포인트 클라우드 범위에 따라 X, Y 및 Z 방향의 극 값이 결정되고 그리드가 각 좌표축의 셀 간격에 따라 분할되어 Voxel이라는 작은 3차원 정육면체를 생성하는 방법이다 (Fig. 1 (b)). 이 때 적어도 하나의 데이터 포인트를 포함하는 입방체의 모든 부피를 합산하여 객체의 부피를 산정한다.
2.2 고해상도 포인트 클라우드 구축
본 연구에서는 일정한 조건의 식생 형상을 유지하기 위해 인공식생을 활용하여 포인트 클라우드를 구축하였다. 이를 통해 자연적으로 발생할 수 있는 식생 성장의 불규칙성을 최소화하고자 하였다. 본 연구에서는 Ahn et. al. (2020) 연구에서 활용된 인공 식생을 활용하였으며, 상세한 인공식생의 제원은 해당 논문에서 확인 할 수 있다.
고해상도 포인트 클라우드 수집을 위해 Leica의 RTC 360 3D 레이저 스캐너를 활용하였다. RTC 360의 레이저 등급은 1 (IEC 60825-1:2014)이며, 수평 방향으로 360°, 수직 방향으로 300°까지 측정할 수 있다 (Ahn et al. 2020). 또한 1회 측정으로 최소 0.5 m에서 130 m까지 측정이 가능하며, 초당 2,000,000개의 포인트 측정이 가능하다 (Ahn et al. 2020). 해당 스캐너의 각 정밀도는 0.005°이고, 10 m 구간에서 측정 시 오차 1.9 mm의 정밀한 측정이 가능하다 (Ahn et al. 2020). 10 m 측정구간에서 경사가 있을 시 단일 측정에서 발생하는 데이터 노이즈는 0.4 mm이다 (Ahn et al. 2020). 정밀한 데이터 정합을 위해 대상 샘플 식생을 중심으로 Fig. 2와 같이 8방향의 위치 및 지면에서 동일한 높이로 설정한 후 가장 정밀한 3 mm의 해상도로 스캔하였다 (Ahn et al. 2020).

2.3 포인트 클라우드의 후처리 과정
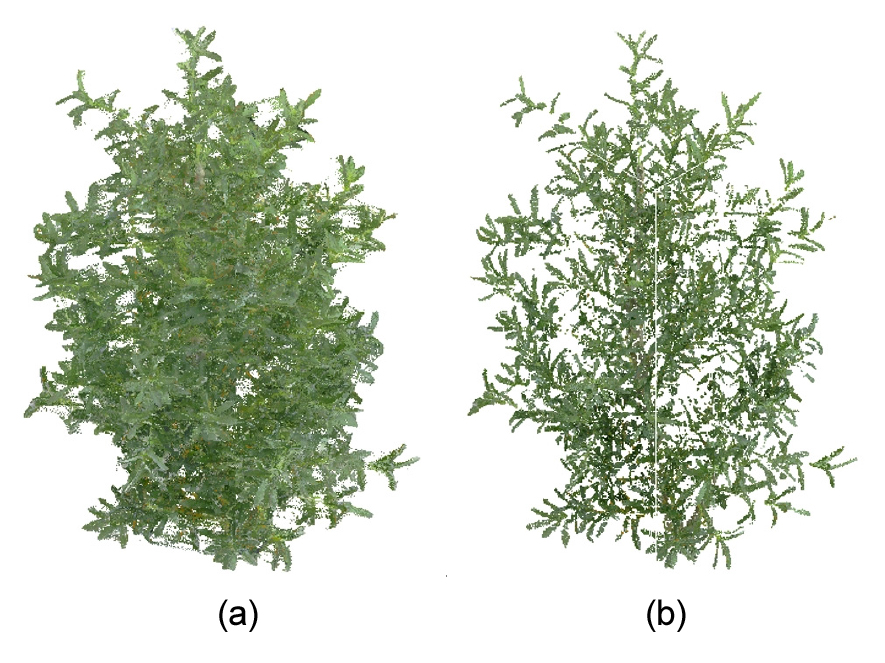
3차원 스캐너를 활용한 포인트 클라우드 구축은 현장 및 기계적인 상황, 기술적 한계 등의 문제로 인해 객체를 구현하는데 필요하지 않거나 부정확한 형태를 구현하게 하는 수많은 이상치 (Outlier) 혹은 노이즈가 포함되는 경우가 있다. 따라서 측정된 원시 데이터는 일정한 필터링 과정을 통해 최적의 데이터를 활용하여야 한다. 가장 대표적인 필터링 방법은 통계적 이상치 제거 (Statistical Outlier Removal, SOR) 방법이다 (Boothroyd et al. 2017). 이 방법은 초기 원시 데이터에서 각각의 포인트와 가장 가까운 포인트 사이에 평균 거리를 계산하고, 일정한 표준 편차를 벗어나는 점을 이상치로 간주하여 제거하는 방법이다. 그러나 이 방법은 포인트가 구현하는 물리적 형상을 고려하지 않고 단순히 포인트 간 표준 편차에 의지하여 이상치를 제거해 나가기 때문에 필요 이상으로 진행된 필터링 과정은 객체를 구현하는 포인트가 충분히 포함되지 않을 수 있기 때문에 주의하여야 한다 (Jang et al. 2020). 본 연구에서는 원시 데이터 Fig. 3 (a)로부터 총 10차 필터링에 걸친 각 단계별 포인트를 활용하여 부피를 산정하였다 (Fig. 3 (b)).
3. 3차원 포인트 클라우드 단일 식생의 기반 부피 산정 결과
3.1 식생 부피의 기준값(reference value) 측정
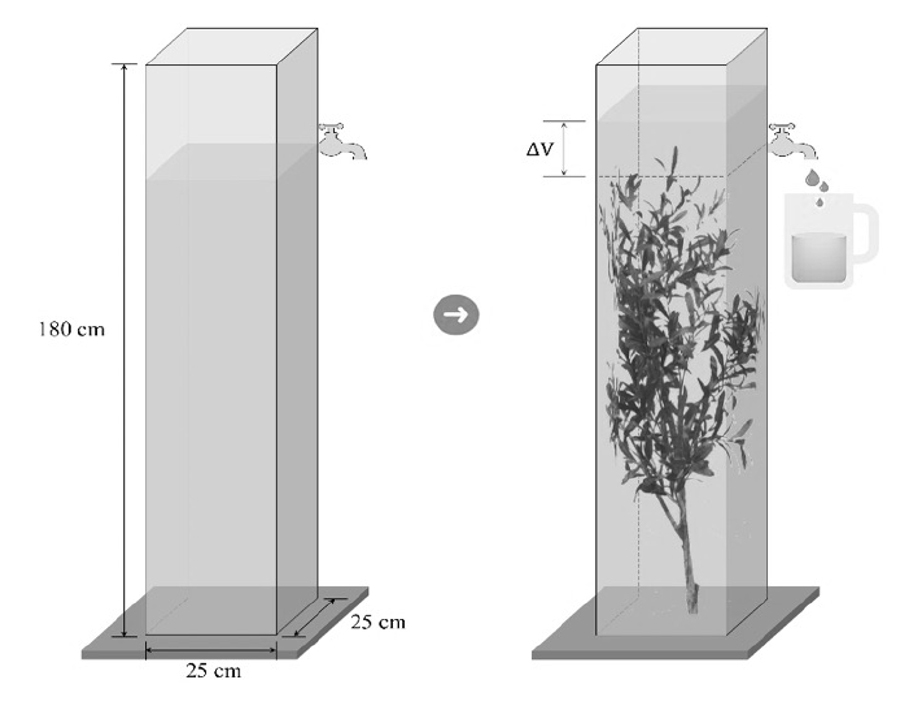
본 연구에서 Alpha shape와 Voxel을 활용한 식생 부피 산정 결과의 고찰을 위해 식생 부피의 기준값 (reference value)이 필요하다. 정확한 기준값 측정을 위해 레이저 스캔할 때의 식생 상태를 그대로 유지하여 부피를 측정하였다. 식생 부피의 기준값은 폭과 길이가 25 cm, 높이가 180 cm인 수조에 식생을 넣어 식생의 부피만큼 넘치는 물의 용량을 측정하였다. 기존의 기준값 측정은 식생을 작은 크기로 절단하여 측정하였으나, 줄기와 가지 절단과정에서 오차가 발생하였기 때문에 식생 한 그루가 완전히 잠길 수 있는 크기의 수조를 활용하였다. 식생 부피 측정 방법은 Fig. 4에 나타난 바와 같이 수조 상단에 있는 밸브 위치까지 물을 담고 수표면이 안정화될 때 영점을 잡는다. 그리고 밸브를 닫고 식생이 완전히 잠기도록 수조에 넣고 밸브를 열어 영점을 기준으로 차오른 물을 비커에 담는다. 수표면이 영점 위치에 도달할 때까지 밸브를 통해 흐르는 물을 모아 용량을 측정하였다.
대상 식생의 부피 기준값을 측정한 결과, 물의 용량은 1,053 ml로 나타났고 환산된 부피는 0.001053 m3이다. 따라서 실제 측정된 부피 값은 Alpha shape와 Voxel을 활용하여 산정된 식생 부피 값과 비교하여 각각의 오차를 산정하였고, 하천 식생 부피 산정에 적절한 방법을 제시하였다.
3.2 Alpha Shape을 활용한 부피 산정
SOR 후처리가 완료된 포인트 클라우드를 활용하여 Alpha Shape를 활용한 단일 식생의 부피를 Fig. 5와 같이 산정하였다. 먼저 원시 데이터를 활용한 부피 산정결과 0.1234 m3이었으며, 이는 실제 부피인 0.001053 m3과 비교하여 0.122347 m3 과다 산정되었음을 알 수 있다. 원시 데이터는 식생 형상을 재구현하는데 필요하지 않은 다수의 이상치가 포함되었기 때문에 불필요한 영역에서 부피가 산정되었음을 의미한다. SOR 적용 단계 별 부피 산정 결과, 필터링 될수록 오차가 감소되었음을 확인하였으나 10차 필터링 후에도 부피가 0.0187 m3으로 산정되어 실제 부피 대비 여전히 0.017647 m3과대 산정되었음을 알 수 있다. SOR을 적용할수록 불필요한 데이터가 제거됨과 동시에 너무 많은 포인트가 제거된다면 실제 객체를 온전히 구현하지 못할 수도 있다. 실제로 많은 연구에서 2차 혹은 3차 필터링 과정을 추천하고 있으나 원시 데이터 품질에 따라 필터링이 요구되는 최적의 횟수는 달라질 수 있다. 따라서 본 연구에서는 1차에서 10차까지 진행된 필터링 단계 별 부피 산정을 통해 민감도를 분석해 보았다. 또한 너무 많은 필터링 과정은 충분한 포인트가 포함되지 않을 수도 있기 때문에 10차 이상의 필터링은 진행하지 않았다.
3.3 Voxel을 활용한 부피 산정
Voxel을 활용한 부피 산정 결과는 Fig. 6과 같다. Voxel의 경우 셀 사이즈에 따라 모든 포인트를 포함하는 Voxel의 개수가 달라지기 때문에 셀 사이즈에 매우 민감하다. 본 연구에서는 약 1.3 mm 정도로 셀 사이즈를 설정하여 부피를 산정하였다. 먼저 원시 데이터에 대한 부피 산정결과 0.0030 m3로 산정되어 실제 부피인 0.001053 m3과 0.001942 m3차이가 있는 것으로 나타났다. 이는 Alpha Shape 산정 결과와 마찬가지로 초기의 데이터는 불필요한 다수의 포인트를 포함하고 있기 때문에 필터링 과정의 중요성을 보여주고 있다. 여러 차례 필터링 된 데이터일수록 실제 부피와 가까워지는 경향이 있었으나, 8차 필터링 이후에는 다시 오차가 증가하는 것으로 나타났다. 이를 통해 너무 많은 필터링 과정이 객체의 형상을 충분히 재현하지 못할 수 있음을 입증하였다. Voxel을 활용한 부피 산정결과 평균 0.0017 m3의 부피가 산정되었으며, 평균 오차는 0.000662 m3인 것을 알 수 있다. Alpha Shape과 Voxel 기법에 의한 각 SOR 단계 별 부피 산정 결과를 Table 1과 같이 정리하였다.
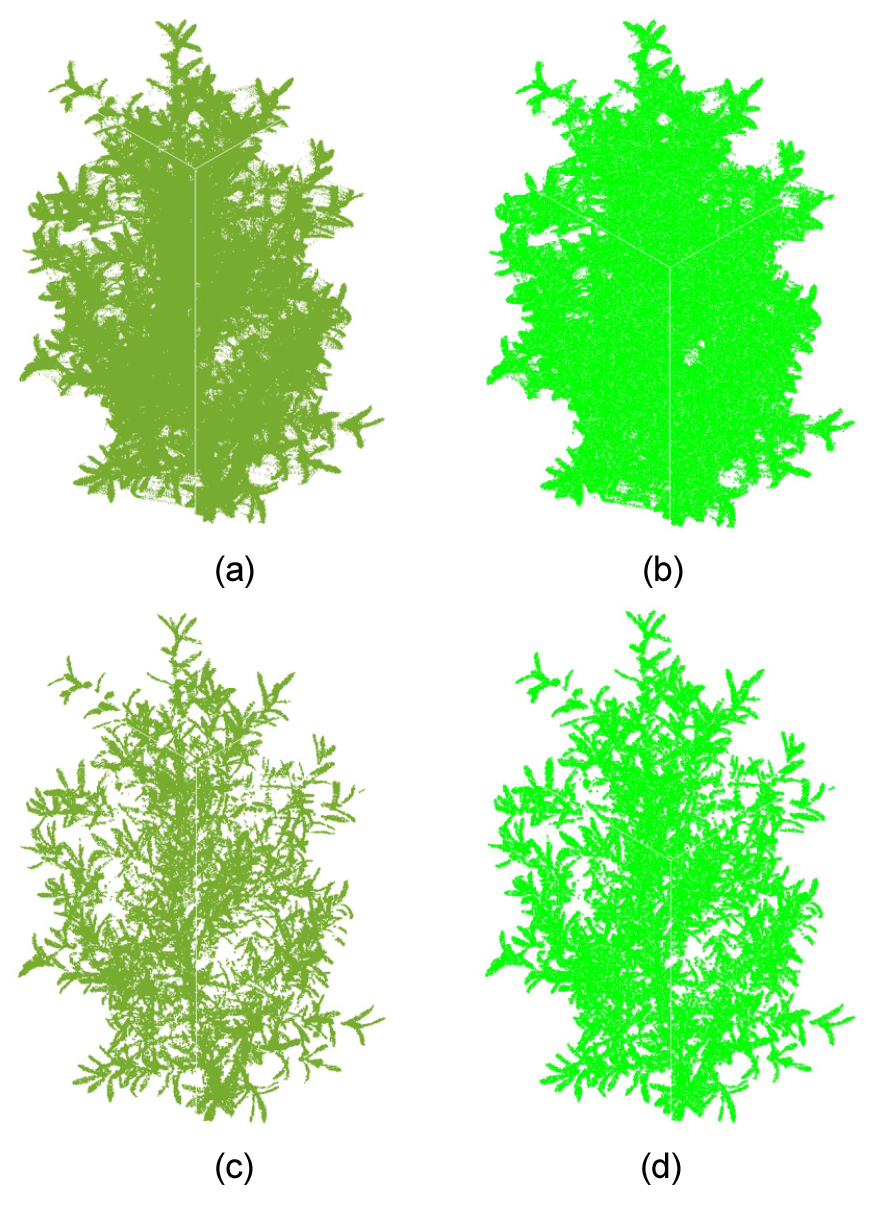
Table 1.
Volume calculation results for each filtering step using Alpha Shape and Voxel
4. 고 찰
Alpha Shape 기법은 포인트의 최극점을 연결하는 방법의 하나이며, Voxel 기법의 경우 측정된 포인트를 3차원 입방체 형태로 변환하여 부피를 산정하는 방법이다. 두 기법 모두 객체의 형상을 구현하는데 탁월한 것으로 알려져 있다. Alpha Shape을 활용한 부피 산정결과, 필터링과 관계없이 실제 부피에 비해 과다 산정됨을 알 수 있었다. Alpha Shape은 객체 구현방법이 유사한 Convex Hull 방법에 비해 외곽형태를 비교적 잘 구현하는 것으로 알려졌으나, 본 연구의 대상과 같이 잎과 줄기가 치밀하게 구성되어 있지만, 내부의 공극을 정확하게 구현할 수 없었기 때문에 부피가 과대 산정된 것으로 추정할 수 있다.
반면에 Voxel 기법의 경우 Alpha Shape 보다는 실제 부피와 유사함을 알 수 있다. Voxel 기법을 활용한 부피 산정 결과 8차 필터링 후 실제 부피와 가장 유사하였으며, 이후에는 필터링이 진행될수록 실제 부피에 비해 과소 선정됨을 알 수 있다. 그러나 Voxel 기법의 경우 측정된 포인트를 기반으로 입방체를 구성하여 부피를 산정하는 방법으로 스캐닝 과정에서 빼곡한 잎사귀 내 포인트가 측정되지 않았을 경우 마찬가지로 내부의 부피가 정밀하게 산정되지 않을 수도 있다.
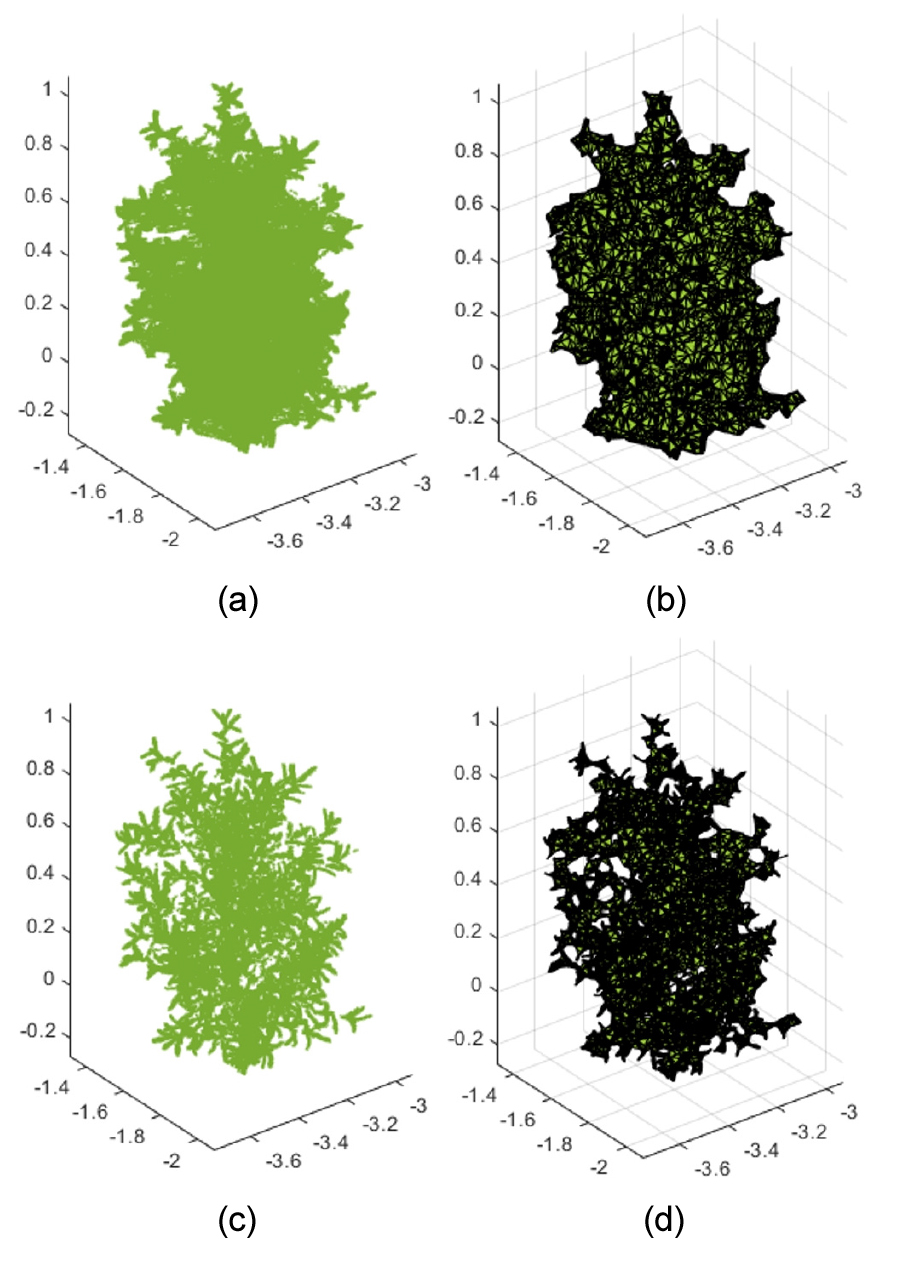
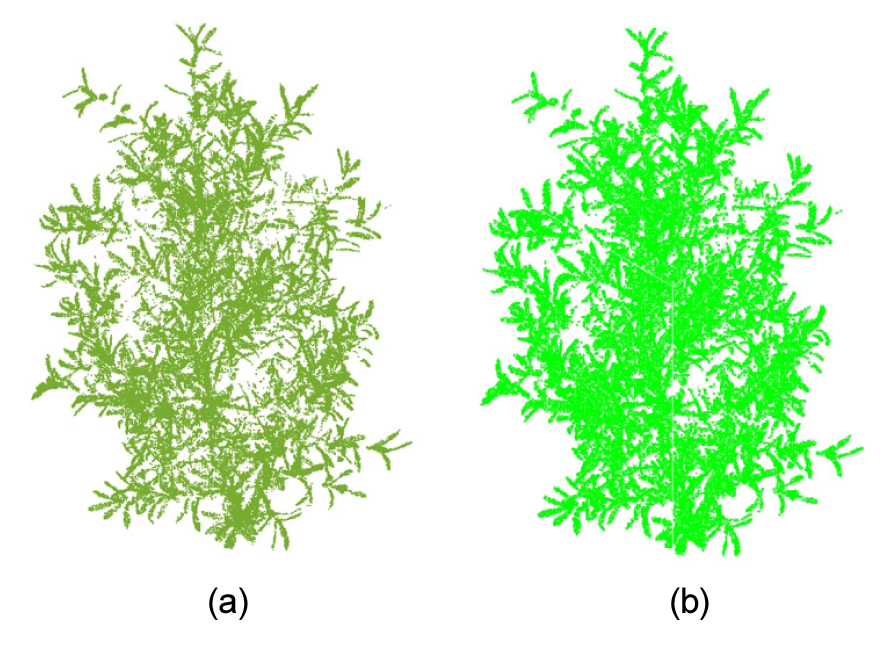
본 연구의 결과를 보면 Alpha Shape 기법에 비해 Voxel 기법 적용이 부피 산정에 더 적합한 것으로 볼 수 있지만 두 기법 모두 필터링에 주의해야 함을 알 수 있다. Alpha Shape의 경우 여러 차례 반복될수록 오차가 감소됨을 알 수 있으나 지나치게 많은 필터링 과정은 본래의 객체를 구현하지 못할 수도 있음에 주의하여야 한다. 특히 Voxel 기법의 경우 8차 이상의 필터링은 실제 부피보다 적게 산정됨을 보여준 바 있다. Fig. 7은 10차까지 진행된 필터링 결과 및 Voxel 구현 결과이다. Fig. 6의 그림과 비교했을 때 상당히 많은 부분의 포인트가 제거된 것을 확인할 수 있다. 특히 작은 가지 (twig)의 경우 필터링 과정에서 연결되지 못하고 중간에 가지가 끊겨 있는 것을 확인할 수 있다. 따라서 전체 부피 산정 값이 비슷하였음에도 불구하고 부피를 산정함에 있어 오차가 포함될 수 있음에 주의할 필요가 있다. 작은 가지 혹은 거의 2차원의 형태를 띠는 잎의 경우 이러한 오차가 포함될 수 있음을 반드시 고려해야 할 것이다.
5. 결 론
본 연구에서는 단일 식생을 대상으로 측정된 3차원 포인트 클라우드를 기반으로 데이터 필터링 후 Alpha Shape 기법과 Voxel 기법을 각각 적용하여 부피를 산정하였다. Alpha Shape 기법을 적용한 부피 산정 결과, 여러 차례 필터링 된 데이터를 적용함에도 불구하고 실제 부피에 비해 과대 산정됨을 보여주었다. 이는 최극점을 연결하여 객체를 재구현하는 Alpha Shape 기법의 부피 산정 과정에서 사이가 촘촘한 잎사귀 내 공극의 부피가 정확하게 구현되지 않은 결과로 추정할 수 있다. 만일 본 연구의 대상과 같이 잎이 빼곡하게 구성된 식생이 아닌 공극의 영향이 적고 복잡하지 않는 형태로 구성된 물체일 경우 좀 더 정확한 결과 도출을 기대할 수 있다.
또 다른 적용 기법인 Voxel을 활용한 부피 산정 결과, 실제 측정 부피와 유사함을 보여주었으며, 특히 8차 필터링 후 결과가 실제 부피와 가장 유사하였다. 8차 이후 필터링 결과는 실제 부피에 비해 과소 산정되는 것으로 보아 Voxel 기법 적용시 적절한 필터링에 대한 민감도 분석이 반드시 필요할 것으로 판단된다. 이러한 본 연구의 결과를 통해 향후 하천에서 식생으로 인해 흐름이 방해되거나 차단되는 영역을 분석하거나 이로 인한 유속 저하 혹은 수위 상승을 분석하는 연구에 활용될 수 있을 것으로 기대된다.
