

1. 서 론
2. 기존 시공간영상계측법의 검토
2.1 휘도경사텐서법
2.2 CASTI
2.3 F-STIV법
3. 인공 시공간영상을 이용한 분석
3.1 인공 시공간영상 제작
3.2 인공 시공간영상 분석
3.3 혼합 분석법의 제안
4. 실제 영상에 대한 적용 및 검토
5. 결 론
1. 서 론
시공간영상(STI, spatio-temporal image)을 이용하는 것이 표면영상유속계를 실용적으로 만드는 데 핵심이 된다는 것은 잘 알려져 있다(Fujita and Tsubaki 2003, Lee and Yu 2024). 그런데, 이처럼 시공간영상을 분석하는 방법 안에도 세부적으로는 상당히 다양한 방법이 있다. 주로 사용되는 방법은 STI의 경사를 이용하는 휘도경사텐서법(Fujita and Tsubaki 2003), STI를 상호상관법으로 분석하는 방법(Yu et al. 2015), STI를 자기상관분석하여 경사를 찾아내는 방법(Notoya et al. 2017), STI를 고속푸리에변환(FFT, fast Fourier transform)한 뒤 주파수공간에서 경사를 찾아내는 방법(Zhang et al. 2017, Yu and Liu 2021)이 있다. 다만, 이런 각 분석법이 어떤 적용성이 있고 서로 장단점이 무엇인지에 대해서는 논의된 바가 없다.
본고에서는 저자가 개발하여 이용하는 두 가지 STI 분석법인 상호상관법기반 시공간영상계측법(Yu et al. 2015)와 FFT기반 시공간영상계측법(Lee et al. 2023)의 정확도와 특징을 인공시공간영상(artificial spatio- temporal images)을 이용하여 평가하기로 한다. 또한, 이 두 기법의 장점만을 적절히 선택한 혼합형 시공간영상계측법(H-STIV, hybrid spatio-temporal image velocimetry)을 제시한다.
2. 기존 시공간영상계측법의 검토
2.1 휘도경사텐서법
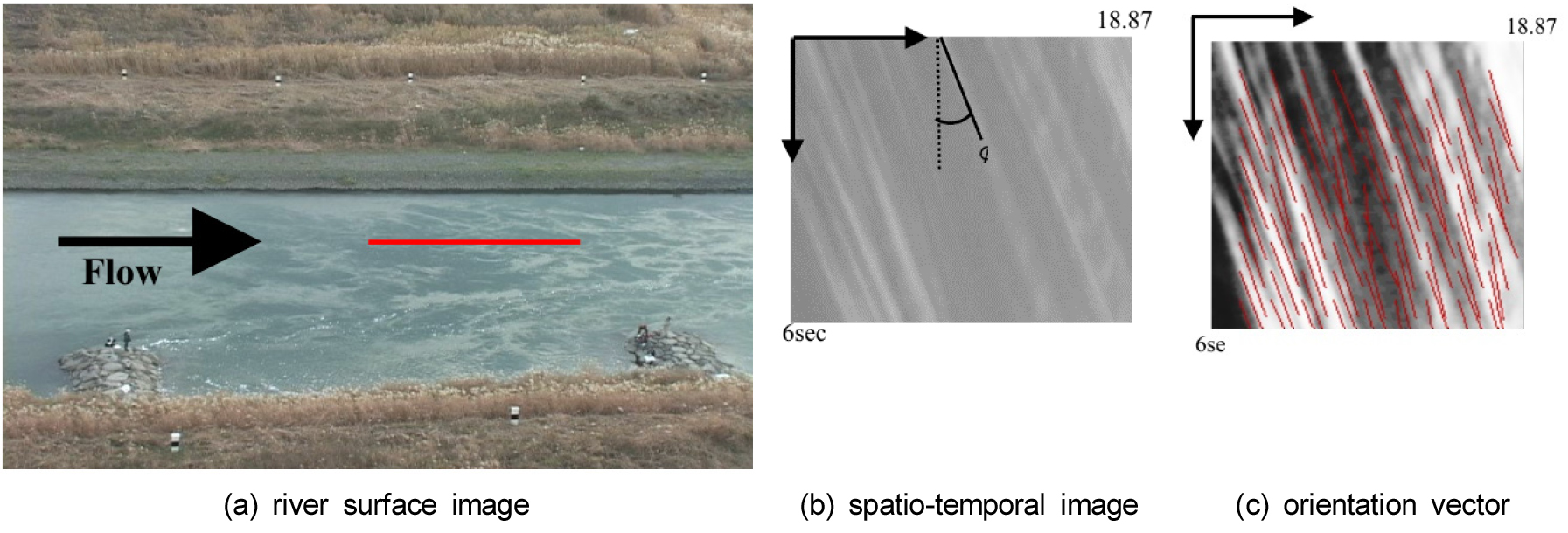
서론에서 언급한 것처럼, STI를 이용한 유속분석은 Fujita and Tsubaki (2003)가 처음으로 제시하였다. Fig. 1 (a)에 보인 것처럼 하천 표면영상에서 한 줄의 영상(적색선)을 추출하고 이것을 여러 프레임에 대해 차례대로 시간적으로 쌓으면, Fig. 1 (b)와 같은 시공간영상이 만들어 진다. 이 시공간에서 줄무늬의 각도가 바로 유속을 나타낸다. Fujita and Tsubaki (2003)는 5차 차분식을 만들어 이 줄무늬의 경사를 계산하였다. 이들은 이 방법을 휘도경사텐서법이라 불렀다.
휘도경사텐서법의 한계는 사전에 설정된 방향(보통은 주흐름방향)만의 유속을 구할 수 있다는 점이며, 또한 Fig. 1 (c)와 같은 짧은 선분형태의 기울기를 구해 평균하기 때문에 오류가 포함될 가능성이 높다는 점이다.
2.2 CASTI
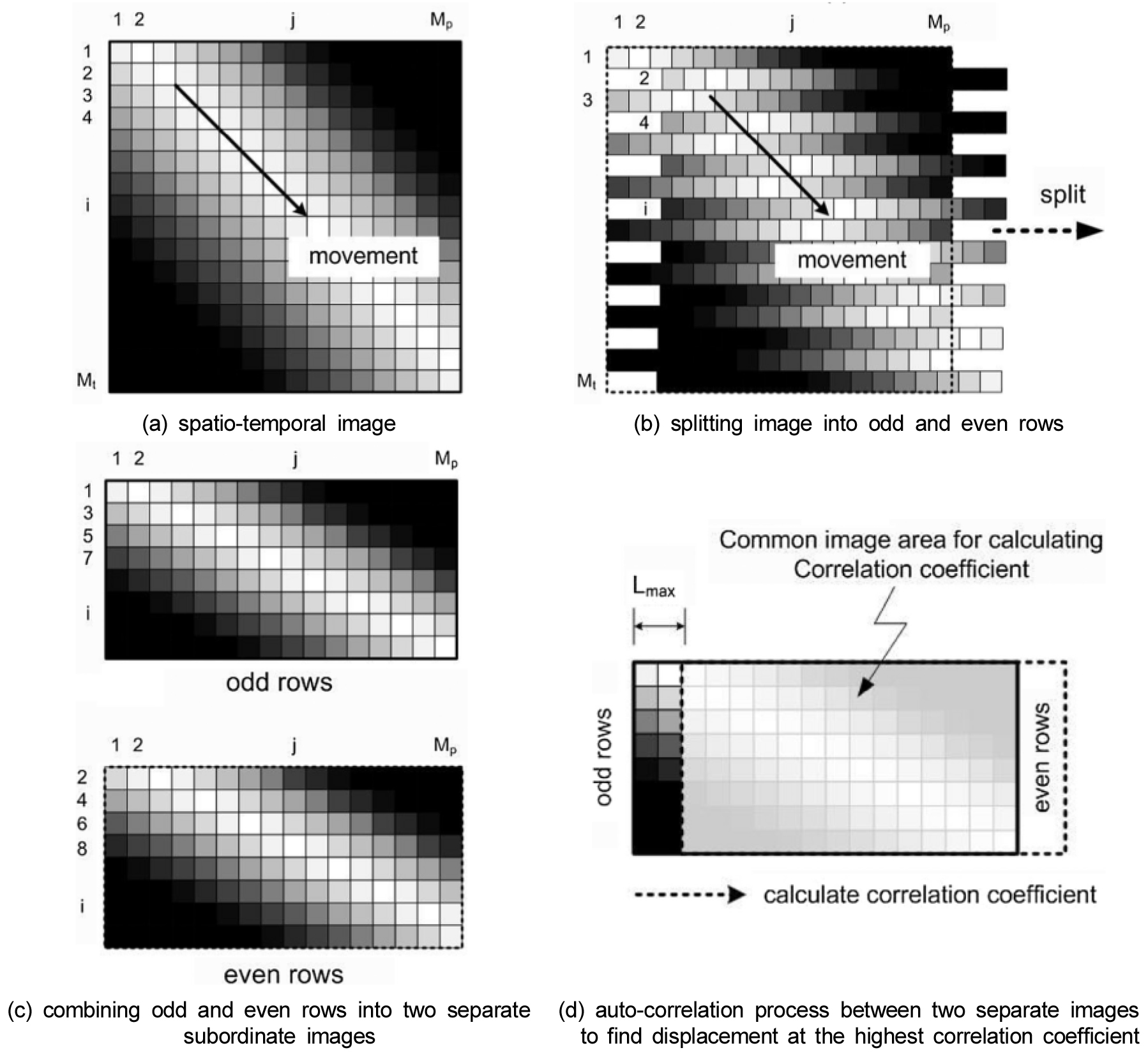
Yu et al.(2015)은 STI를 분석하는 데 상호상관법을 적용하고, 이 방법을 CASTI (Correlation Analysis of Spatio-Temporal Image velocimetry)라 불렀다. 이 방법의 개념은 Fig. 2와 같다.
CASTI법은 휘도경사텐서법과 달리 STI 전체를 한꺼번에 분석할 수 있어 계산시간도 절약되고 영상 기울기의 대표성도 충분하다고 할 수 있다. 또한, 분석시간이 매우 짧다는 것도 큰 장점이라 볼 수 있다. 본고에서 이용하는 방법은 CASTI를 약간 변형시킨 것이며, 여기서는 이 방법을 C-STIV (Correlation-based STIV)라 부르기로 한다.
이 방법의 한계를 살펴보면 다음과 같다. C-STIV의 가장 큰 단점은 저유속에 대응하기 어려우며, 특히 바닥이 훤히 들여다 보이는 저유속의 경우, 흐름보다는 고정된 물체를 먼저 추적할 가능성이 높다는 점이다. 또한, 유속에 따라 적절한 탐색범위를 사전에 지정해 주어야 한다는 점도 이 기법을 사용할 때 반드시 주의해야 하는 부분이다.
2.3 F-STIV법
영상을 분석하는 데 고속푸리에변환(FFT)를 이용하는 방법은 영상처리분야에서 오래 전부터 시행되어 왔다. Yu and Liu (2021)는 STI의 줄무늬 경사를 계산하는 데 FFT를 이용하였다(Fig. 3). STI의 시공간영상을 FFT를 수행하여 주파수영상으로 변환한 뒤 이 주파수영상에서 최대값을 이루는 직선을 찾아 그 기울기를 구하고, 이것이 시공간영상의 최대변위 줄무늬와 직각을 이룬다는 특성을 이용하였다. 본고에서는 이 방법을 F-STIV (Fft-based STIV)라 부르기로 한다.
이 방법은 계산이 매우 빠르고, 특히 영상범위(유속)가 작은 영역의 줄무늬각을 검출하는 데 유용할 것으로 기대된다. 아울러, 하안에 인접한 흐름이나, 하상의 재료가 드러나는 흐름과 같은 경우에도 F-STIV는 안정적으로 유속을 분석해 낼 수 있다는 장점이 있다. 반면, F-STIV에서는 줄무늬 경사를 계산하는 데 arctan 함수를 이용하므로, 줄무늬 경사가 큰 고유속(또는 큰 영상변위)인 경우에는 미소한 추정 오차도 영상변위에서는 크게 증폭되어 나타날 가능성이 높다는 점은 이 방법이 지닌 단점 중 하나이다.
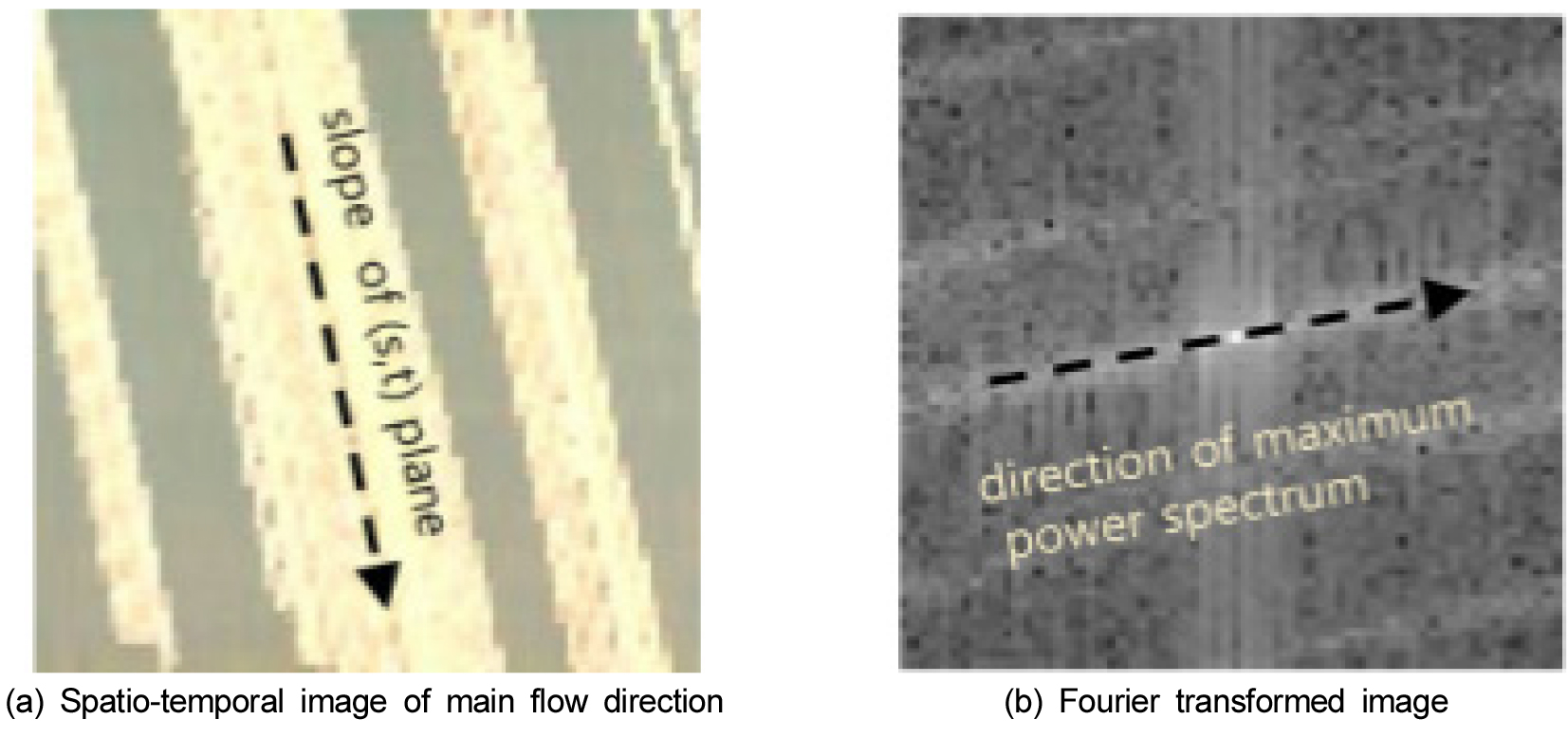
Fig. 3.
Spatio-temporal image of main flow direction and its Fourier transformed image (Yu and Liu 2021).
3. 인공 시공간영상을 이용한 분석
3.1 인공 시공간영상 제작
시공간영상은 가로축은 공간, 세로축은 시간을 나타낸다. 그리고 그 줄무늬의 기울기()는 영상내 이동하는 추적자의 영상속도(px/fr)을 나타낸다는 것은 설명한 바 있다.
본고에서는 이러한 시공간영상을 인공적으로 제작하기로 하였다. 이것은 표면영상유속계의 각종 기법을 시험하고 평가하기 위해, VSJ (2002)의 인공입자영상 제작법을 이용한 것과 유사하다(Yu et al. 2015, Yu and Liu 2021).
인공영상을 생성하기 위해서는 대상이 되는 속도장을 결정하고, 추적 입자의 위치 정보를 기반으로 영상 내 입자를 생성하는 과정이 필요하다. 이와 같은 인공영상 생성방법을 간단히 소개하면 우선 대상으로 하는 속도장으로서 1차원적인 해석 함수를 이용하거나, Rankine 와류나 Couette 흐름과 같이 수치적으로 모의하기 쉬운 흐름장을 이용하거나, LES 또는 직접 수치 모의에 의한 수치 모의 결과를 속도장으로 이용하도록 한다. 본고에서는 가로 방향의 간단한 균일흐름을 선택하였다. 다만, 유속을 분석하는 것이 아니라 그 전단계인 영상변위만을 분석하는 것으로 하였다. 실제 영상분석에서는 영상변위를 분석하고 여기에 시공간적인 축척(와 )을 적용하여 유속으로 환산하기 때문에, 영상변위에 따라서 각 분석방법의 특징을 살펴보기 쉽기 때문이다.
인공영상에서 입자 명암값 형태는 Gauss 분포를 사용하였으며, 실제 좌표 에 중심이 있는 입자가 영상좌표 에 나타날 때 입자의 명암값 는 다음의 Eq. 1로 구한다.
여기서, dp에는 영상 내 입자의 크기이다. 또한 I0는 입자의 가장 밝은 부분의 명암값이다. 식 밝기를 나타내는 입자의 명암값은 레이저 평면광 두께 내부의 분포함수로 가우스함수를 사용한다. 입자 중심에서 최대 강도는 입자가 평면광 두께 내의 위치를 고려하여 Eq. 2로 결정하였다.
여기서, T는 레이저 광면의 두께, Imax는 영상위의 입자의 최대 명암값이다.
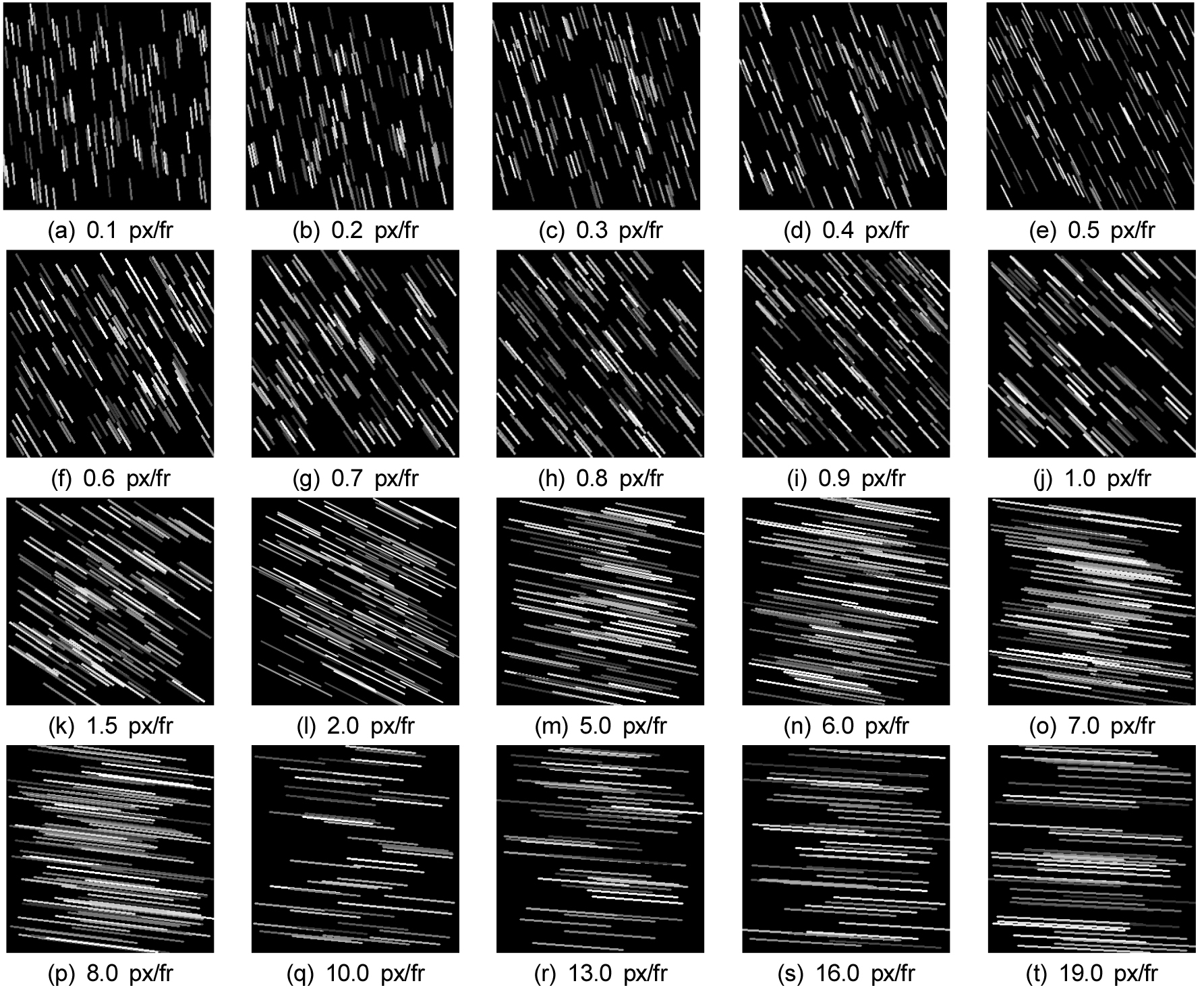
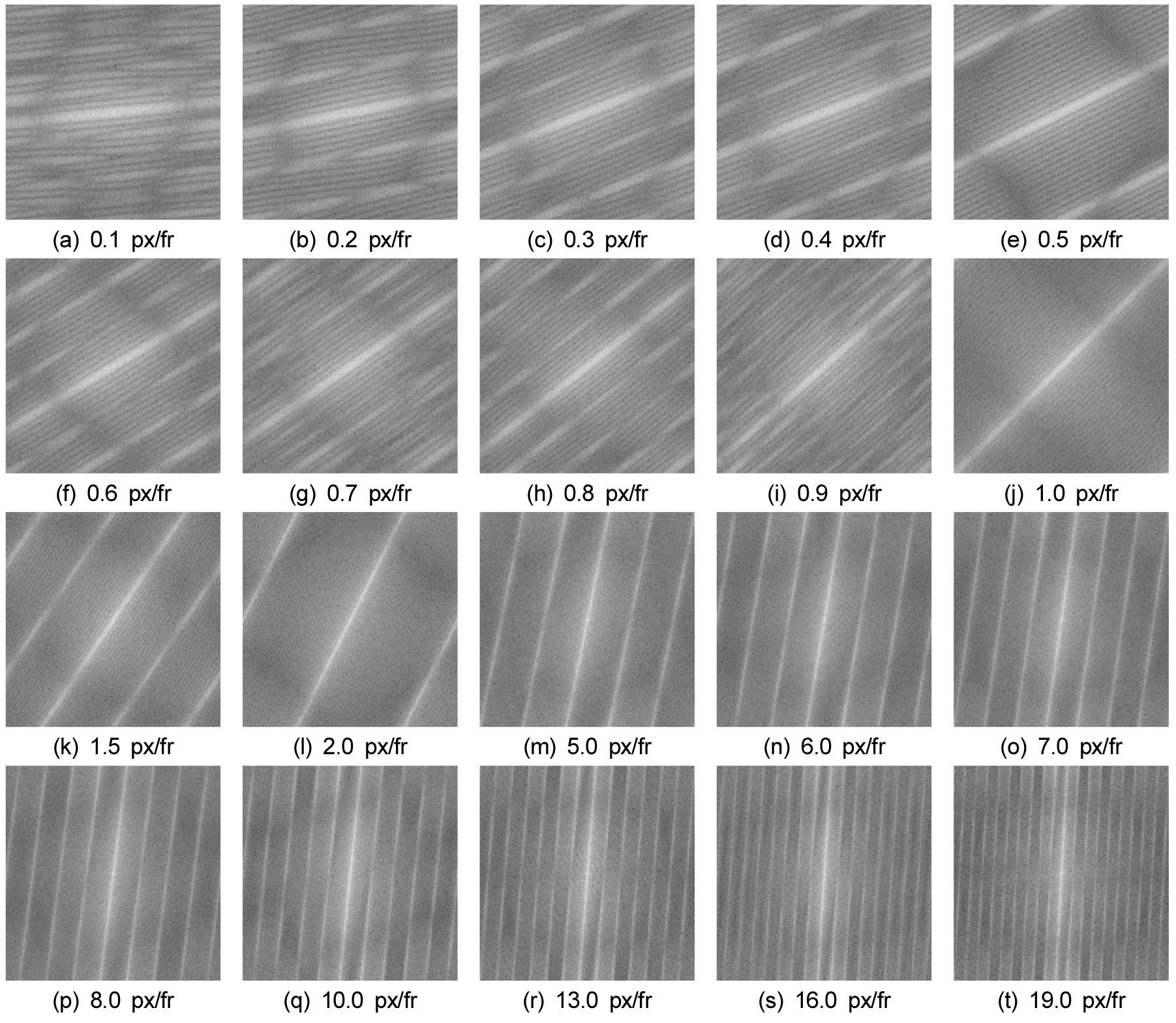
이렇게 기본이 되는 300×300 px 크기의 영상을 만들고, 여기서 중앙부분에 그은 영상줄을 프레임마다 하나씩 잘라내어 시공간영상을 구성하였다. 이 때 프레임 사이의 영상변위를 사전에 지정한 간격 즉, 0.1 px/fr 부터 19.0 px/fr 까지 지정한다.
실제 표면영상유속계에서 접하는 시공간영상이 어떤 형태를 띄어야 하는가에 대해서는 Lee et al. (2023)에서 언급한 바 있다. 즉, 본 연구에서 작성된 STI는 반드시 영상의 2사분면에서 4사분면 방향의 줄무늬만을 갖는다는 점이다. 즉, STI의 경사각()의 범위는 0 - 180°가 아니라, 0 - 90°로 제한된다. 이런 특성을 이용하면, F-STIV를 적용할 때 계산량을 절반으로 줄일 수 있다.
이런 특성을 모의하기 위해 영상변위가 0.1 px/fr(화소/프레임)부터 19.0 px/fr까지 총 20종류의 인공시공간영상을 만들었다(Table 1과 Fig. 4). 이를 줄무늬각도로 환산한 값도 Table 1에 제시되어 있다. 각 STI는 공간적으로는 300 px, 시간적으로는 300 프레임(10초)이므로 300×300 px의 크기를 갖는다.
Table 1.
Calculated results by C-STIV (correlation) and F-STIV (FFT)
3.2 인공 시공간영상 분석
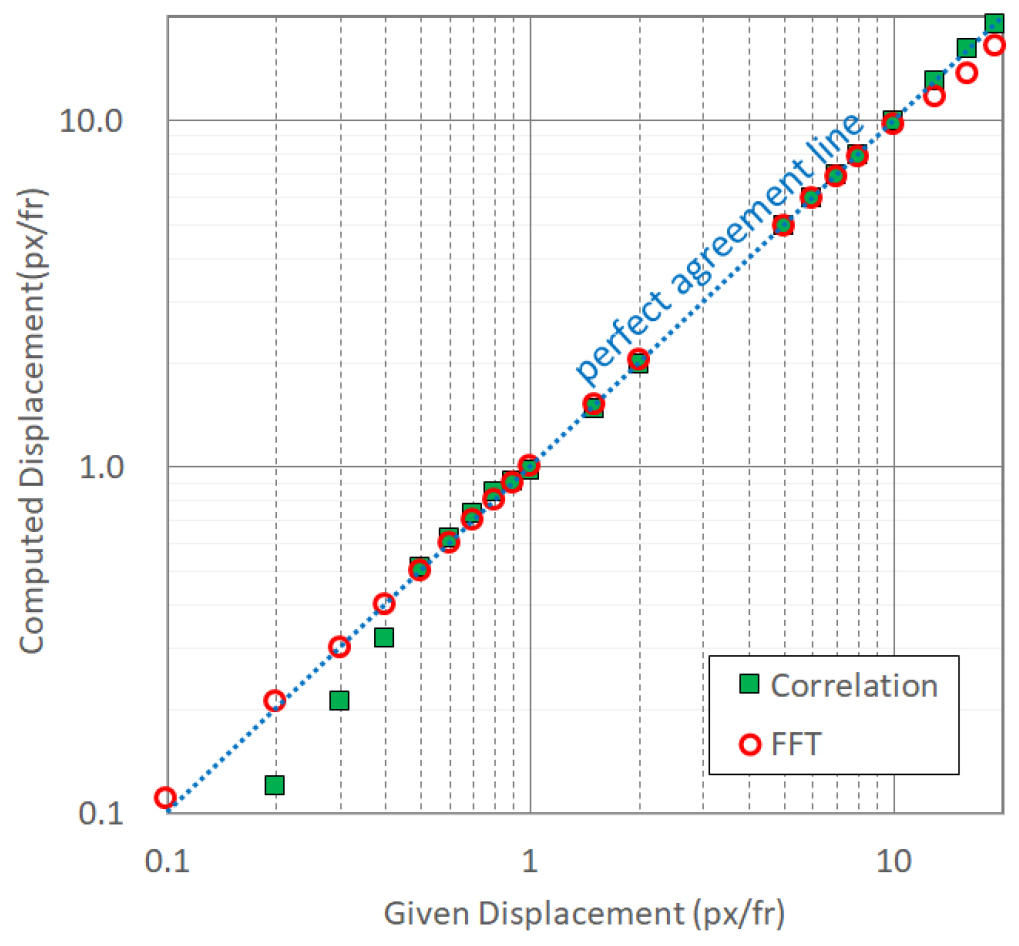
위와 같이 작성한 Fig. 4의 인공 시공간영상을 앞서 설명한 C-STIV와 F-STIV로 분석하였다. 분석된 결과는 Table 1와 같다. 또한, Fig. 5는 이 두 방법이 정확한 영상변위(검정 파선)와 얼마나 일치하는지를 잘 보여준다. 정확일치선(perfect agreement line)에 있으면 분석법이 정확한 영상변위를 산정해 낸 것이며, 파선보다 아래 위치하면 과소평가, 파선보다 위에 있으면 과대평가이다. 분석결과에서 보면, 영상변위가 작은 영역에서는 F-STIV가, 영상변위가 큰 영역에서는 C-STIV가 매우 정확한 결과를 보였다. 영상변위가 중간인 영역에서는 두 방법 모두 만족스런 결과를 보였다.
작은 영상변위 구간에서 C-STIV가 오차가 큰 요인은 다음과 같이 추론해 볼 수 있다. C-STIV는 상호상관법을 이용하므로, 근본적으로 상호상관법이 지닌 한계를 그대로 이어받게 된다. 상호상관법에 의한 영상일치(image matching)에서는 영상이 이산자료이므로, 화소단위의 변위만 산정할 수 있다. 따라서, 이를 극복하기 위한 방법으로 부화소보간(subpixel interpolation)을 이용하기는 하지만(Raffel et al. 2018), 근본적으로는 상호상관법에서는 0.5 화소 미만의 이동은 검출하기 어렵다고 볼 수 있다. 따라서, 상호상관법(C-STIV도 포함하여) 이런 상황은 Fig. 5에서 상호상관법이 0.4 화소 이하에서 오차가 상당하다는 점에서도 확실하게 입증되었다고 볼 수 있다.
한편, F-STIV에서는 Fig. 4의 STI를 FFT 변환하였을 때, Fig. 6와 같은 주파수 공간의 영상이 만들어졌다. 이 FFT 변환 영상에서 가장 밝은 직선의 기울기를 찾으면 된다. 그런데, 이 경우, 줄무늬의 기울기는 arctan 함수로 주어지므로, 기울기가 작은 경우는 약간의 차이는 큰 문제가 되지 않는다. 그런데, 70°나 80°를 넘어 90°에 가까워지는 경우 아주 작은 각도의 차이도 arctan 값에서는 큰 차이를 보이게 된다.
구체적인 예를 들어 살펴보면 다음과 같이 나누어 생각할 수 있다.
먼저 영상변위가 1.0 px (45.0°)인 경우에 대해 생각해 보면 다음과 같다. 이 경우 각도 산정에 0.1° 오차(0.2%)가 생기면, 영상변위에는 0.004 px의 오차(0.4%)가 생긴다. 즉, 각도가 적어도 60 - 70°까지는 큰 문제가 없는 것으로 보인다.
그러나 영상변위가 10 px(기울기 84.3°)인 경우는 상황이 달라진다. 이 경우, 만일 각도 추정에 조금의 오류가 있어, 84.4°를 산정했다고 하면, 각도로 나타낼 때는 겨우 0.1° 차이(0.1%)지만, 영상변위에서는 10.2 px로 2% 차이를 보이게 된다. 이 경향은 줄무늬 기울기가 90°에 가까워질수록 더욱 심해진다.
실제로 Fig. 5의 결과에서 보면, 영상변위가 8.0 px/fr (줄무늬 각도 82.9°)보다 큰 경우부터 F-STIV로 산정한 영상변위는 참값보다 점점 더 작은 값으로 과소산정하는 것을 볼 수 있다.
3.3 혼합 분석법의 제안
위 계산결과를 토대로, 다음과 같은 방법을 사용하기로 하였다.
인공으로 만들어진 STI들을 C-STIV와 F-STIV로 분석한 결과를 살펴보면(Fig. 5), 전체 영역은 세 부분으로 나눌 수 있다. 영상변위가 0.4 px/fr (21.8°) 이하인 영역은 F-STIV가 정확하고 C-STIV는 오차가 있으며, 영상변위가 8 px/fr (84.3°) 이상인 영역은 C-STIV가 정확히 값을 산정하는 반면 F-STIV는 오차가 큰 경향을 보인다. 이 둘 사이의 영역, 즉 영상변위 0.5 px/fr (26.6°) - 7.0 px/fr (81.9°)의 영역에서는 두 방법은 거의 비슷한 결과를 보인다.
주어진 STI를 C-STIV와 F-STIV로 분석한 뒤, 그 결과 영상변위가 2.0 px/fr (63.4°) 이하인 경우는 F-STIV의 값을 채택하고, 그보다 큰 경우는 C-STIV의 값을 채택한다. 이 방법을 혼합시공간영상분석법, 간단히 H-STIV (Hybrid STIV)라고 부르기로 한다.
4. 실제 영상에 대한 적용 및 검토
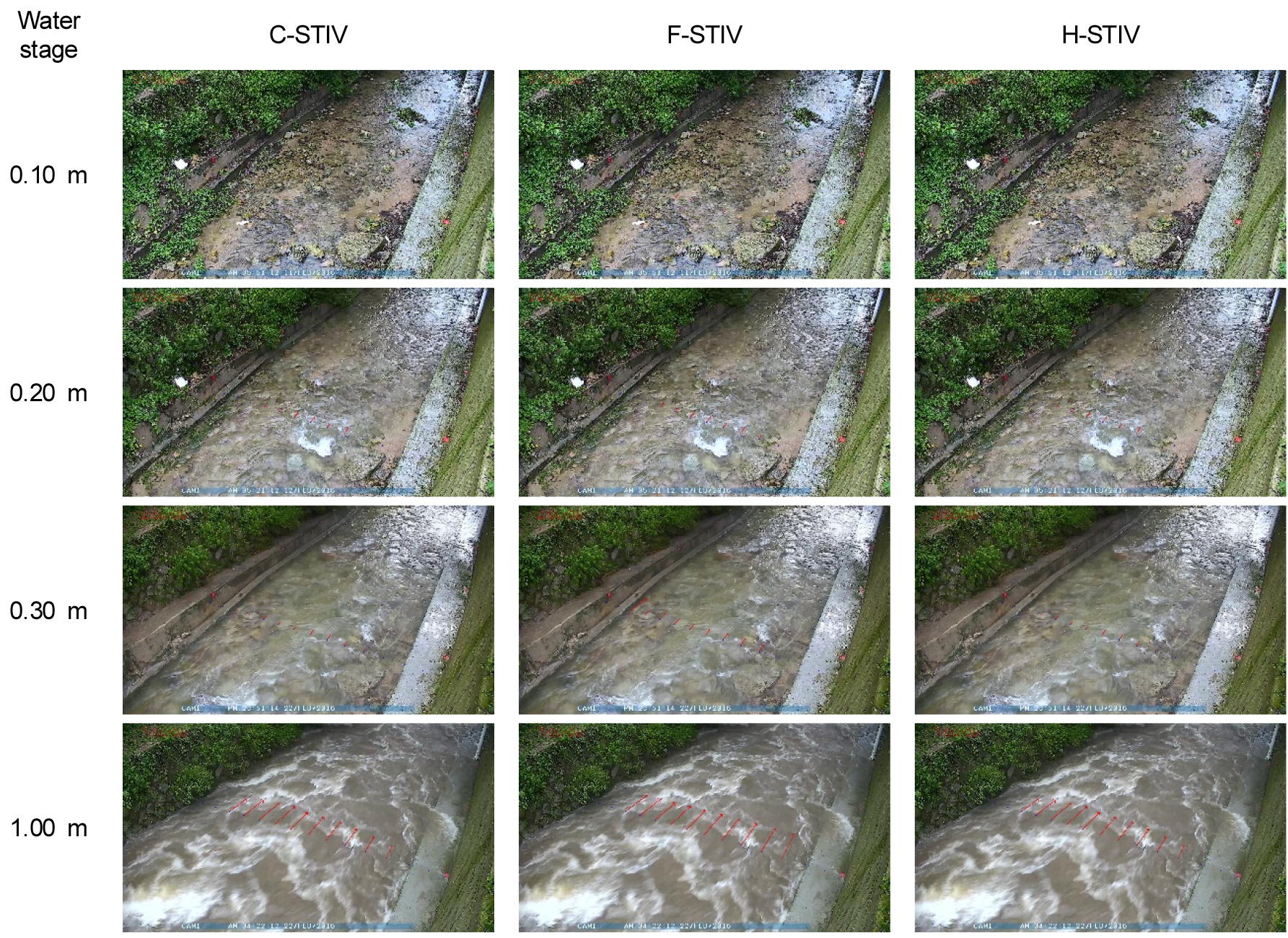
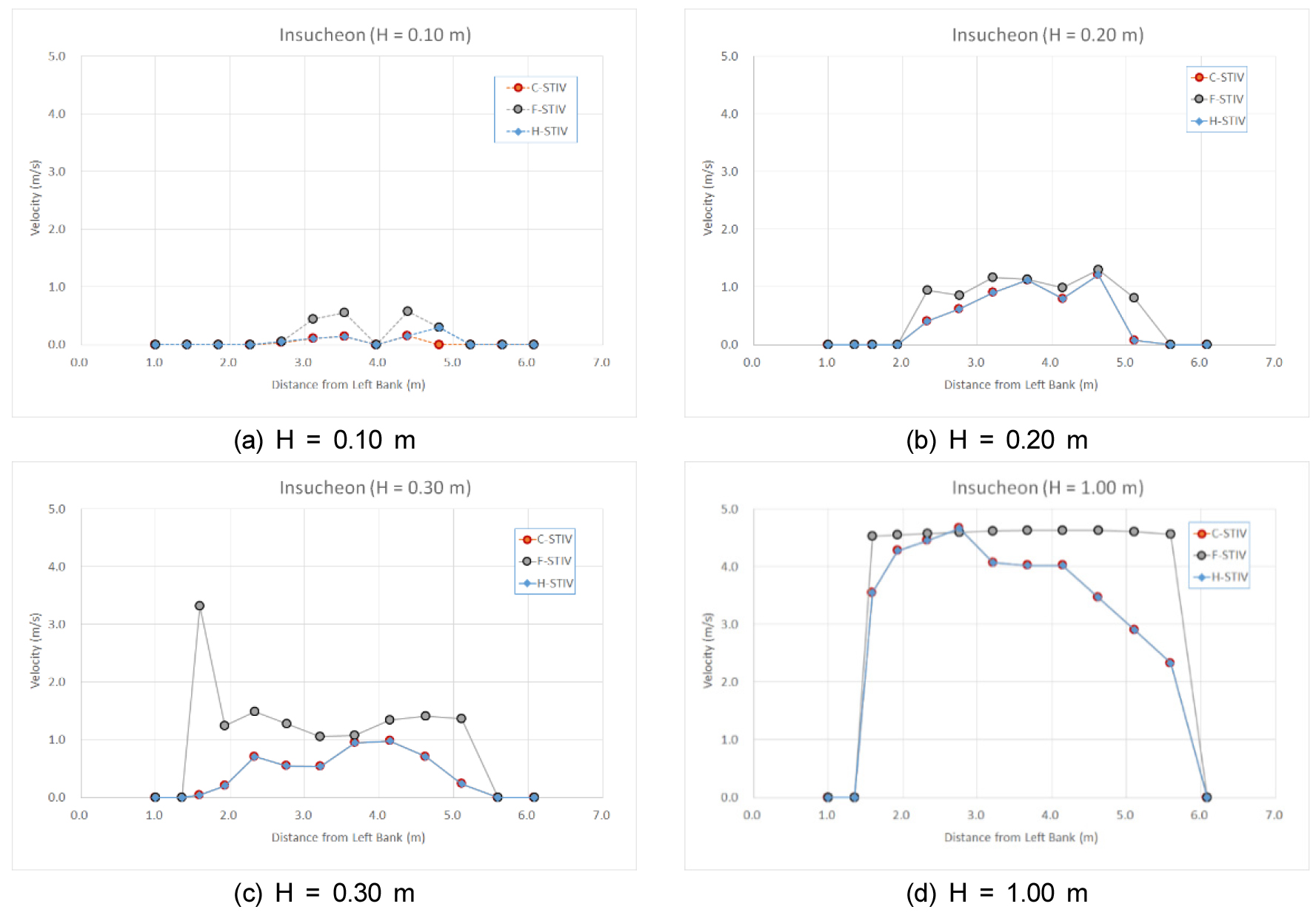
서울의 인수천에서 2022년 8월 6일에 촬영된 4개의 동영상에 C-STIV, F-STIV, H-STIV를 이용하여 분석하였다. 이 때의 수위(실제로는 최심하상을 기준으로 하기 때문에 최대수심과 같음)는 각각 0.10 m, 0.20 m, 0.30 m, 1.00 m의 네 개의 동영상을 준비하였다. 이 영상을 각각 C-STIV, F-STIV- H-STIV로 분석한 결과를 영상으로는 Fig. 7과 같다. 또한, 이 결과를 수치적으로 살펴보면 Fig. 8과 같다. Fig. 8 (a)에서 C-STIV는 저수위 때는 하상에 드러난 자갈들의 영향으로 유속이 거의 0.0 m/s에 가까운 값을 보이는 것을 알 수 있다. 분석자료를 살펴보면, 저수위(H = 0.20 m)일 때의 영상변위는 0.2 - 0.7 px/fr 이었다. 따라서, 이 경우는 H-STIV는 모두 F-STIV의 분석결과를 이용하였다. H = 0.20 m일 때인 Fig. 8 (b)의 결과에서는 영상변위는 0.4 - 5.2 px/fr이었다. 따라서 H-STIV는 측정점별로 일부는 C-STIV의 결과를, 다른 일부는 F-STIV의 결과를 채택하였다. Fig. 8 (c)는 수위가 0.30 m일 때의 분석결과이며, 이 때의 영상변위는 0.2 - 4.6 ps/fr이며, 앞의 H = 0.20 m일 때와 마찬가지로 측정점별로 적절한 영상변위(유속)을 채택하였다. 특히, Fig. 8 (c)에서 두 번째 측정점에 대한 F-STIV는 지나치게 과다한 결과(오류가 의심스러운)를 보였으며, 그 이유는 현재로서는 명확히 알 수 없다. 다만, Fig. 7에서 볼 수 있듯이 이 측정점이 횡단면의 턱이 이루는 직선과 인접한 것이 어떤 영향을 미치지 않았나 추정해 볼 수 있으며, 이에 대해서는 추후 상세한 검토가 필요하다. H-STIV는 F-STIV의 값 대신 보다 합리적으로 추정되는 C-STIV의 값을 이용하였다. 마지막으로 Fig. 8 (d)에서는 수위가 1.0 m인 사례이며, 이 경우는 영상변위가 11.3 - 22.4 px/fr이고 SIV에서 영상 줄무늬의 크기는 85° 이상에 이르렀다. 따라서, 이 값은 신뢰성이 떨어진다고 보고, C-STIV의 결과를 이용하였다.
5. 결 론
본 연구의 내용은 요약하면, 다음과 같다.
(1)시공간영상(STI)를 분석하여 영상변위(유속)을 측정하는 방법들 중 하나인 C-STIV(상호상관법-기반 STIV)과 F-STIV(FFT-기반 STIV)의 장단점과 한계를 검토하였다.
(2)영상변위가 0.1 px/fr부터 19.0 px/fr에 이르는 20종의 인공시공간영상을 작성하여 위의 두 방법에 대해 영상변위별 분석성능을 검토하고, 위의 두 방법이 어떤 경우에 적합하거나 부적합한지를 검토하였다. 그 결과 영상변위가 작은 영역은 F-STIV가 정확하고, 영상변위가 큰 영역은 C-STIV가 정확하며, 중간은 두 방법 모두 비슷한 경향이 있음을 알았다.
(3)이 결과를 토대로 2.0 px/fr(줄무늬 기울기 63.4°)를 기준으로 이보다 작은 범위에서는 F-STIV의 결과를, 이보다 큰 범위에서는 C-STIV의 결과를 채택하는 H-STIV를 제안하였다.
(4)제안된 방법을 인수천에서 관측된 네 가지 동영상(수위 0.10 m, 0.20 m, 0.30, 1.00 m)에 대해 적용한 결과, H-STIV가 저수위(작은 영상변위)와 중수위(중간 영상변위), 고수위(큰 영상변위)의 상황에 맞게 효율적으로 유속을 산정해낼 수 있었다.
